1 参考文档
6. 线程的定义与线程切换的实现 — [野火]RT-Thread内核实现与应用开发实战——基于STM32 文档
RTOS的线程,是一个独立的、无限循环且不能返回的函数。
2 定义线程栈
RTOS中存在多线程和线程切换,没有进程的概念,也不需要进程的概念;
每个线程都有线程栈,通常是预先定义好的全局数组,存在RAM中。
比如定义两个线程栈:
/* 定义线程栈*/
rt_uint8_t rt_flag1_thread_stack[512];
rt_uint8_t rt_flag2_thread_stack[512];线程栈里面应该放什么?后面会讲到。
3 定义线程控制块
struct rt_thread,类似Linux中的进程描述符struct_task;
struct rt_thread// (1)
{void *sp; /* 线程栈指针 *//* 线程函数名,表示入口地址* 线程是一个独立的、无限循环且不能返回的函数*/void *entry;void *parameter; /* 线程形参 *//* 线程栈的起始地址* 就是刚才分配的rt_flag1_thread_stack和rt_flag2_thread_stack*/void *stack_addr;rt_uint32_t stack_size; /* 线程栈大小,单位为字节 */rt_list_t tlist; /* 线程链表节点 */
};/* 定义线程控制块 */
struct rt_thread rt_flag1_thread;
struct rt_thread rt_flag2_thread;
4 实现线程创建函数
4.1 rt_thread_init()
rt_err_t rt_thread_init(struct rt_thread *thread,// (1)void (*entry)(void *parameter),// (2)void *parameter,// (3)void *stack_start,// (4)rt_uint32_t stack_size)// (5)
{rt_list_init(&(thread->tlist));// (6)thread->entry ==== (void *)entry;// (7)thread->parameter ==== parameter;// (8)thread->stack_addr ==== stack_start;// (9)thread->stack_size ==== stack_size;// (10)/* 初始化线程栈,并返回线程栈指针 */thread->sp ==== (void *)rt_hw_stack_init( thread->entry,thread->parameter, (void *)((char *)thread->stack_addr + thread->stack_size) );return RT_EOK;
}/* 线程就绪列表*/
rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX];/* 调用 */
/* 初始化线程1 */
rt_thread_init(&rt_flag1_thread, /* 线程控制块 */flag1_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag1_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag1_thread_stack) ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */
rt_list_insert_before( &(rt_thread_priority_table[0]), &(rt_flag1_thread.tlist) );/* 初始化线程2 */
rt_thread_init(&rt_flag2_thread, /* 线程控制块 */flag2_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag2_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag2_thread_stack) ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */
rt_list_insert_before( &(rt_thread_priority_table[1]), &(rt_flag2_thread.tlist) );
4.2 rt_hw_stack_init()
① 相关结构体
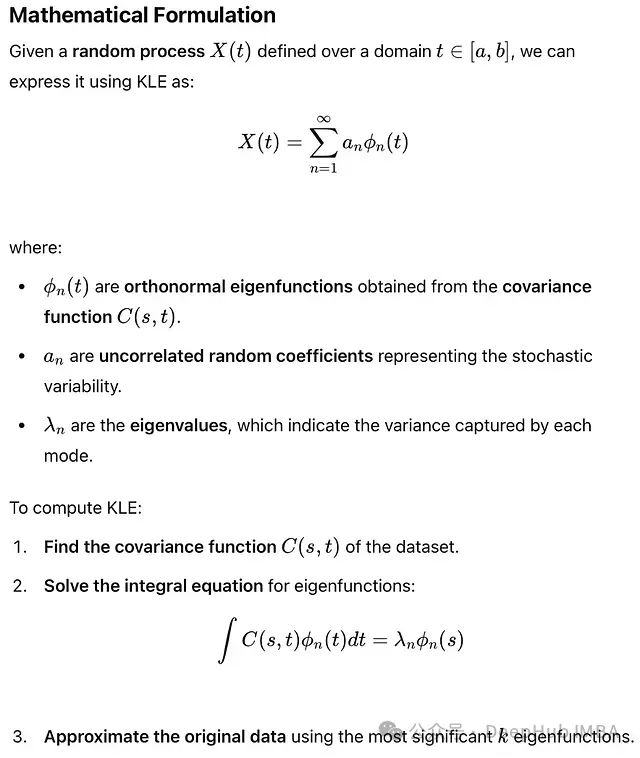
struct stack_frame
{/* r4 ~ r11 register异常发生时需手动保存的寄存器 */rt_uint32_t r4;rt_uint32_t r5;rt_uint32_t r6;rt_uint32_t r7;rt_uint32_t r8;rt_uint32_t r9;rt_uint32_t r10;rt_uint32_t r11;struct exception_stack_frame exception_stack_frame;/* 异常发生时自动保存的寄存器 */rt_uint32_t r0;rt_uint32_t r1;rt_uint32_t r2;rt_uint32_t r3;rt_uint32_t r12;rt_uint32_t lr;rt_uint32_t pc;rt_uint32_t psr;
};② 实现
/* 线程栈初始化 */
rt_uint8_t *rt_hw_stack_init(void *tentry,// (1)void *parameter,// (2)rt_uint8_t *stack_addr)// (3)
{struct stack_frame *stack_frame;// (4)rt_uint8_t *stk;unsigned long i;/* 获取栈顶指针 */stk ==== stack_addr;/* stk指针继续向下移动sizeof(struct stack_frame)个偏移 */stk -= sizeof(struct stack_frame);// (7)/* 将stk指针强制转化为stack_frame类型后存到stack_frame */stack_frame ==== (struct stack_frame *)stk;// (8)/* 以stack_frame为起始地址,将栈空间里面的sizeof(struct stack_frame)个内存初始化为0xdeadbeef */for (i = 0; i < sizeof(struct stack_frame) / sizeof(rt_uint32_t); i ++)// (9){((rt_uint32_t *)stack_frame)[i] = 0xdeadbeef;}/* 初始化异常发生时自动保存的寄存器 —— 在哪里自动保存?*/// (10)stack_frame->exception_stack_frame.r0 ==== (unsigned long)parameter; /* r0 : argument */stack_frame->exception_stack_frame.r1 ==== 0; /* r1 */stack_frame->exception_stack_frame.r2 ==== 0; /* r2 */stack_frame->exception_stack_frame.r3 ==== 0; /* r3 */stack_frame->exception_stack_frame.r12 ==== 0; /* r12 */stack_frame->exception_stack_frame.lr ==== 0; /* lr */stack_frame->exception_stack_frame.pc ==== (unsigned long)tentry; /* entry point, pc */stack_frame->exception_stack_frame.psr ==== 0x01000000L; /* PSR *//* 返回线程栈指针,指向stack_frame,或者说,指向r4 */return stk;// (11)
}- 初始化线程栈,其实就是初始化线程栈中靠近栈顶位置的stack_frame结构体
- stack_frame->expection_stack_frame.r0、pc、psr分别是入参、线程函数指针和PSR值
- stack_frame的r4~r10暂时不用保存
③ 示意图
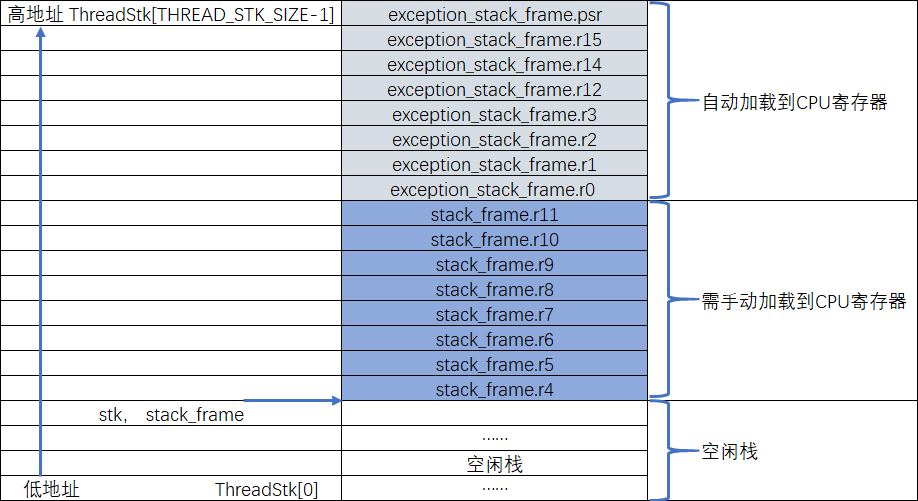
- 线程栈地址是ThreadStk[0],也就是rt_flag1_thread_stack数组的地址
- 线程栈地址不是线程栈指针,后者也就是线程控制块中的sp,指的是存放r4~psr的一块区域的地址,也就是指向r4
- 从线程栈地址找到线程栈指针,需要从线程栈栈顶往下偏移来找
5 实现调度器
5.1 调度器初始化函数
/* 初始化系统调度器 */
void rt_system_scheduler_init(void)
{register rt_base_t offset;// (1)/* 线程就绪列表初始化 */for (offset ==== 0; offset < RT_THREAD_PRIORITY_MAX; offset ++)// (2){rt_list_init(&rt_thread_priority_table[offset]);}/* 初始化当前线程控制块指针 */rt_current_thread ==== RT_NULL;// (3)
}
5.2 调度器初始化
int main(void)
{/* 硬件初始化 *//* 将硬件相关的初始化放在这里,如果是软件仿真则没有相关初始化代码 *//* 调度器初始化 */rt_system_scheduler_init();/* 初始化线程 */rt_thread_init( &rt_flag1_thread, /* 线程控制块 */flag1_thread_entry, /* 线程入口地址,也就是线程函数 */RT_NULL, /* 线程形参 */&rt_flag1_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag1_thread_stack) ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */rt_list_insert_before( &(rt_thread_priority_table[0]),&(rt_flag1_thread.tlist) );/* 初始化线程 */rt_thread_init( &rt_flag2_thread, /* 线程控制块 */flag2_thread_entry, /* 线程入口地址,也就是线程函数 */RT_NULL, /* 线程形参 */&rt_flag2_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag2_thread_stack) ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */rt_list_insert_before( &(rt_thread_priority_table[1]),&(rt_flag2_thread.tlist) );/* 启动系统调度器 */rt_system_scheduler_start();
}
5.3 启动调度器
/* 启动系统调度器 */
void rt_system_scheduler_start(void)
{register struct rt_thread *to_thread;/* 手动指定第一个运行的线程 */// (1)to_thread ==== rt_list_entry(rt_thread_priority_table[0].next,struct rt_thread,tlist);rt_current_thread ==== to_thread;// (2)/* 切换到第一个线程,该函数在context_rvds.S中实现,在rthw.h声明,用于实现第一次任务切换。* 当一个汇编函数在C文件中调用的时候,如果有形参,则执行的时候会将形参传入到CPU寄存器r0。* 注意,这里传入的参数是线程栈指针的指针!*/rt_hw_context_switch_to((rt_uint32_t)&to_thread->sp); // (3)
}
6 线程切换
6.1 rt_hw_context_switch_to()
;*************************************************************************
; 全局变量
; IMPORT用于导入全局变量
; 在该函数中需要修改这些全局变量,并在其他地方要用到
;*************************************************************************IMPORT rt_thread_switch_interrupt_flag ; PendSV中断服务函数执行标志IMPORT rt_interrupt_from_thread ; 用于存储上一个线程的栈的sp的指针IMPORT rt_interrupt_to_thread ; 用于存储下一个将要运行的线程的栈的sp的指针;*************************************************************************
; 常量 (5)
;*************************************************************************
;-------------------------------------------------------------------------
;有关内核外设寄存器定义可参考官方文档:STM32F10xxx Cortex-M3 programming manual
;系统控制块外设SCB地址范围:0xE000ED00-0xE000ED3F
;-------------------------------------------------------------------------
SCB_VTOR EQU 0xE000ED08 ; 向量表偏移寄存器
NVIC_INT_CTRL EQU 0xE000ED04 ; 中断控制状态寄存器
NVIC_SYSPRI2 EQU 0xE000ED20 ; 系统优先级寄存器(2)
NVIC_PENDSV_PRI EQU 0x00FF0000 ; PendSV 优先级值 (lowest)
NVIC_PENDSVSET EQU 0x10000000 ; 触发PendSV exception的值;*************************************************************************
; 代码产生指令
; AERA表示汇编一个新的数据段或者代码段
; .text表示段名字,如果段名不是以字母开头,而是以其它符号开头则需要在段名两边加上‘|’
; CODE表示为代码
; READONLY表示只读
; ALIGN=2,表示当前文件指令要2^2字节对齐
; THUMB表示THUMB指令代码
; REQUIRE8和PRESERVE8均表示当前文件的栈按照8字节对齐
;*************************************************************************AREA |.text|, CODE, READONLY, ALIGN=2THUMBREQUIRE8PRESERVE8;/*
; *-----------------------------------------------------------------------
; * 函数原型:void rt_hw_context_switch_to(rt_uint32 to);
; * r0 --> to
; * 该函数用于开启第一次线程切换
; *-----------------------------------------------------------------------
; */rt_hw_context_switch_to PROC ; PROC表示函数开始; 导出rt_hw_context_switch_to,让其具有全局属性,可以在C文件调用EXPORT rt_hw_context_switch_to;*************************************************************************
; 当一个汇编函数在C文件 中调用的时候:
; 如果有一个形参,则执行的时候会将这个形参传入到CPU寄存器r0;
; 如果有两个形参,第二个则传入到r1;
; 这里r0保存的是rt_hw_context_switch_to()的第一个参数(也就是唯一参数)to_thread->sp
;*************************************************************************; 设置rt_interrupt_to_thread的值 (8);将rt_interrupt_to_thread的地址加载到r1LDR r1, =rt_interrupt_to_thread (8)-1;将r0的值存储到rt_interrupt_to_threadSTR r0, [r1] (8)-2; 设置rt_interrupt_from_thread的值为0,表示启动第一次线程切换 (9);将rt_interrupt_from_thread的地址加载到r1LDR r1, =rt_interrupt_from_thread (9)-1;配置r0等于0MOV r0, #0x0 (9)-2;将r0的值存储到rt_interrupt_from_threadSTR r0, [r1] (9)-3; 设置中断标志位rt_thread_switch_interrupt_flag的值为1 (10);将rt_thread_switch_interrupt_flag的地址加载到r1LDR r1, =rt_thread_switch_interrupt_flag (10)-1;配置r0等于1MOV r0, #1 (10)-2;将r0的值存储到rt_thread_switch_interrupt_flagSTR r0, [r1] (10)-3; 设置 PendSV 异常的优先级LDR r0, =NVIC_SYSPRI2LDR r1, =NVIC_PENDSV_PRILDR.W r2, [r0,#0x00] ; 读ORR r1,r1,r2 ; 改STR r1, [r0] ; 写; 触发 PendSV 异常 (产生上下文切换) (12)LDR r0, =NVIC_INT_CTRLLDR r1, =NVIC_PENDSVSETSTR r1, [r0]; 开中断CPSIE F (13)CPSIE I; 永远不会到达这里ENDP ; 表示函数结束,和PROC成对使用ALIGN 4 (3)END (2)利用(PendSV)中断来实现线程切换,中断中还可以访问线程上下文,在中断中把线程上下文替换了,并把前线程放入到就绪队列,应该是这个逻辑。
注意:
这里没有改变rt_interrupt_from_thread和rt_interrupt_to_thread是线程栈sp(指针)的指针的属性;
也就是触发中断时,中断获取的这两个参数都是双重指针。
6.2 PendSV_Handler()中断函数
;/*
; *-----------------------------------------------------------------------
; * void PendSV_Handler(void);
; * r0 --> switch from thread stack
; * r1 --> switch to thread stack
; * psr, pc, lr, r12, r3, r2, r1, r0 are pushed into [from] stack
; *-----------------------------------------------------------------------
; */PendSV_Handler PROC
EXPORT PendSV_Handler; 失能中断,为了保护上下文切换不被中断 (1)
MRS r2, PRIMASK
CPSID I; *-----------------------------------------------------------------------
; 获取中断标志位,看看是否为0,正常情况不应该为0,为0则退出 (2)
; 可以看下汇编获取全局变量的值,都需要两步:先把地址存放到寄存器,然后从寄存器拿到值,存放到另一个寄存器
; *-----------------------------------------------------------------------
; 加载rt_thread_switch_interrupt_flag的地址到r0
LDR r0, ====rt_thread_switch_interrupt_flag (2)-1
; 加载rt_thread_switch_interrupt_flag的值到r1
LDR r1, [r0] (2)-2
; 判断r1是否为0,为0则跳转到pendsv_exit
CBZ r1, pendsv_exit (2)-3; r1不为0则清0 (3)
MOV r1, #0x00
; 将r1的值存储到rt_thread_switch_interrupt_flag,即清0
STR r1, [r0]; 判断rt_interrupt_from_thread的值是否为0 (4)
; 加载rt_interrupt_from_thread的地址到r0
LDR r0, ====rt_interrupt_from_thread (4)-1
; 加载rt_interrupt_from_thread的值到r1
LDR r1, [r0] (4)-2
; 判断r1是否为0,为0则跳转到switch_to_thread
; 第一次线程切换时rt_interrupt_from_thread肯定为0,则跳转到switch_to_thread
CBZ r1, switch_to_thread (4)-3; ======================================================================================================== 上文保存 ================================================================================================ (6)
; 当进入PendSVC Handler时,上一个线程运行的环境即:
; xPSR,PC(线程入口地址),R14,R12,R3,R2,R1,R0(线程的形参)
; 这些CPU寄存器的值会自动保存到线程的栈中,剩下的r4~r11需要手动保存
; 获取线程栈指针到r1
MRS r1, psp (6)-1
;将CPU寄存器r4~r11的值存储到r1指向的地址
;从r11开始操作(存到寄存器中),每操作一次地址将递减一次
;最后r1指向有效数据最低位
;类似memcpy(r1, [r4, r11], sizeof([r4, r11])
STMFD r1!, {r4 - r11} (6)-2; ======================================================================================================== 当前线程栈指针 -> r0 ================================================================================================ (6)
; 加载r0指向值到r0,即r0====rt_interrupt_from_thread,这是上一步加载过的
LDR r0, [r0] (6)-3
; 将r1的值存储到r0,即更新当前线程栈sp
STR r1, [r0] (6)-4; ======================================================================================================== 目标线程栈指针 -> r1 ======================================================================================================== (5)
switch_to_thread
; 加载rt_interrupt_to_thread的地址到r1
; rt_interrupt_to_thread是一个全局变量,里面存的是线程栈指针SP的指针
LDR r1, ====rt_interrupt_to_thread (5)-1
; 加载rt_interrupt_to_thread的值到r1,即sp指针的指针
LDR r1, [r1] (5)-2
; 加载rt_interrupt_to_thread的值到r1,即sp
LDR r1, [r1] (5)-3; ======================================================================================================== 下文加载 ======================================================================================================== (5)
;将线程栈指针r1(操作之前先递减)指向的内容加载到CPU寄存器r4~r11
; 线程切换的核心,就是psp指针的替换,以及cpu寄存器内容的替换
LDMFD r1!, {r4 - r11} (5)-4; ======================================================================================================== psp替换 ======================================================================================================== (5)
;将线程栈指针更新到PSP
MSR psp, r1 (5)-5pendsv_exit
; 恢复中断
MSR PRIMASK, r2 (7); 确保异常返回使用的栈指针是PSP,即LR寄存器的位2要为1
ORR lr, lr, #0x04 (8)
; 异常返回,这个时候栈中的剩下内容将会自动加载到CPU寄存器:
; xPSR,PC(线程入口地址),R14,R12,R3,R2,R1,R0(线程的形参)
; 同时PSP的值也将更新,即指向线程栈的栈顶
BX lr (9); PendSV_Handler 子程序结束
ENDP (10)当进入PendSVC Handler时,上一个线程运行的环境即:xPSR,PC(线程入口地址),R14,R12,R3,R2,R1,R0(线程的形参)这些CPU寄存器的值会自动保存到线程的栈中,并更新PSP的值,剩下的r4~r11需要手动保存。
中断完成之后,CPU寄存器的r4-r11,xPSR,PSP已经改变;通过psp线程栈指针,可以很方便的找到线程控制块及其成员,至此CPU完成线程切换。
7 系统调度
7.1 rt_schedule()
/* 系统调度 */
void rt_schedule(void)
{struct rt_thread *to_thread;struct rt_thread *from_thread;/* 两个线程轮流切换 */// (1)if( rt_current_thread ======== rt_list_entry( rt_thread_priority_table[0].next,struct rt_thread,tlist) ){from_thread ==== rt_current_thread;to_thread ==== rt_list_entry( rt_thread_priority_table[1].next,struct rt_thread,tlist);rt_current_thread ==== to_thread;}else// (2){from_thread ==== rt_current_thread;to_thread ==== rt_list_entry( rt_thread_priority_table[0].next,struct rt_thread,tlist);rt_current_thread ==== to_thread;}// (3)/* 产生上下文切换 */rt_hw_context_switch((rt_uint32_t)&from_thread->sp,(rt_uint32_t)&to_thread->sp);
}
7.2 rt_hw_contex_switch()
;/*
; *----------------------------------------------------------------------
; * void rt_hw_context_switch(rt_uint32 from, rt_uint32 to);
; * r0 --> from
; * r1 --> to
; *----------------------------------------------------------------------
; */
rt_hw_context_switch PROC
EXPORT rt_hw_context_switch; 设置中断标志位rt_thread_switch_interrupt_flag为1 (1)
; 加载rt_thread_switch_interrupt_flag的地址到r2
LDR r2, ====rt_thread_switch_interrupt_flag (1)-1
; 加载rt_thread_switch_interrupt_flag的值到r3
LDR r3, [r2] (1)-2
;r3与1比较,相等则执行BEQ指令,否则不执行
CMP r3, #1 (1)-3
BEQ _reswitch
; 设置r3的值为1
MOV r3, #1 (1)-4
; 将r3的值存储到rt_thread_switch_interrupt_flag,即置1
STR r3, [r2] (1)-5; 设置rt_interrupt_from_thread的值 (2)
; 加载rt_interrupt_from_thread的地址到r2
LDR r2, ====rt_interrupt_from_thread (2)-1
; 存储r0的值到rt_interrupt_from_thread,即上一个线程栈指针sp的指针
STR r0, [r2] (2)-2_reswitch
; 设置rt_interrupt_to_thread的值 (3)
; 加载rt_interrupt_to_thread的地址到r2
LDR r2, ====rt_interrupt_to_thread (3)-1
; 存储r1的值到rt_interrupt_from_thread,即下一个线程栈指针sp的指针
STR r1, [r2] (3)-2; 触发PendSV异常,实现上下文切换 (4)
LDR r0, ====NVIC_INT_CTRL
LDR r1, ====NVIC_PENDSVSET
STR r1, [r0]
; 子程序返回
BX LR (5)
; 子程序结束
ENDP (6)- 和rt_hw_context_switch_to()逻辑雷同,只不过少了from_thread为0和开PendSV中断(只需要做一次)的操作
8 main()
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
#include <rtthread.h>
#include "ARMCM4.h"/*
*************************************************************************
* 全局变量
*************************************************************************
*/
rt_uint8_t flag1;
rt_uint8_t flag2;/* 每个线程都有一个优先级列表 */
extern rt_list_t rt_thread_priority_table[RT_THREAD_PRIORITY_MAX];/*
*************************************************************************
* 线程控制块 & STACK & 线程声明
*************************************************************************
*/
/* 定义线程控制块 */
struct rt_thread rt_flag1_thread;
struct rt_thread rt_flag2_thread;ALIGN(RT_ALIGN_SIZE)
/* 定义线程栈 */
rt_uint8_t rt_flag1_thread_stack[512];
rt_uint8_t rt_flag2_thread_stack[512];/* 线程声明 */
void flag1_thread_entry(void *p_arg);
void flag2_thread_entry(void *p_arg);/*
*************************************************************************
* 函数声明
*************************************************************************
*/
void delay(uint32_t count);/************************************************************************
* @brief main函数
* @param 无
* @retval 无
*
* @attention
***********************************************************************
*/
int main(void)
{/* 硬件初始化 *//* 将硬件相关的初始化放在这里,如果是软件仿真则没有相关初始化代码 *//* 调度器初始化 */rt_system_scheduler_init();/* 初始化线程 */rt_thread_init( &rt_flag1_thread, /* 线程控制块 */flag1_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag1_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag1_thread_stack) ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */rt_list_insert_before( &(rt_thread_priority_table[0]),&(rt_flag1_thread.tlist) );/* 初始化线程 */rt_thread_init( &rt_flag2_thread, /* 线程控制块 */flag2_thread_entry, /* 线程入口地址 */RT_NULL, /* 线程形参 */&rt_flag2_thread_stack[0], /* 线程栈起始地址 */sizeof(rt_flag2_thread_stack) ); /* 线程栈大小,单位为字节 *//* 将线程插入到就绪列表 */rt_list_insert_before( &(rt_thread_priority_table[1]),&(rt_flag2_thread.tlist) );/* 启动系统调度器 */rt_system_scheduler_start();
}/*
*************************************************************************
* 函数实现
*************************************************************************
*/
/* 软件延时 */
void delay (uint32_t count)
{for(; count!====0; count--);
}/* 线程1 */
void flag1_thread_entry( void *p_arg )
{for( ;; ){flag1 ==== 1;delay( 100 );flag1 ==== 0;delay( 100 );/* 线程切换,这里是手动切换 */rt_schedule();// (注意)}
}/* 线程2 */
void flag2_thread_entry( void *p_arg )
{for( ;; ){flag2 ==== 1;delay( 100 );flag2 ==== 0;delay( 100 );/* 线程切换,这里是手动切换 */rt_schedule();// (注意)}
}
9 汇编翻译
; MOV: 直接赋值
; r1 = 0x00
MOV r1, #0x00; LDR: 取址
; r0 = &rt_interrupt_from_thread
LDR r0, ====rt_interrupt_from_thread
; r0 = *r0
LDR r0, [r0]; 修改全局变量的方法固定:① 将全局变量地址加载到寄存器r1:LDR r1, = rt_xxx
; ② 设置好寄存器r0的值:MOV r0, #0x0
; ③ 将r0的值赋值给全局变量:r0, [r1]; STR: 通过地址赋值
; *r0 = r1
STR r1, [r0]; LDR和STR组合
LDR r0, ====xxx
str r1, [r0]; CBZ:跳转
; if(r1) goto switch_to_thread
CBZ r1, switch_to_thread


![洛谷 P3842 [TJOI2007] 线段 题解](https://img2024.cnblogs.com/blog/3597812/202502/3597812-20250204204741660-355956141.png)