[MoE] Tutel源码解读
前言
最近MoE变得火了起来。但我在和别人讨论MoE时,总有一些不清楚的地方,就算读了论文也不确定内部到底是怎么实现的。于是我决定还是要看一看已有的代码,看看每个细节究竟都是怎么实现的。
作为实现参考,Tutel这篇工作就很不错。最近的工作基本都拿Tutel作为Baseline比较,于是我决定读一读Tutel的源代码,学习一下MoE编程。
在读这篇博客之前,希望你已经大致读过Tutel的论文。如果对下面的代码有不清楚的地方,建议多参考下面的几张图。
Tutel论文
Tutel源码
论文理解
Tutel的主要贡献就是提供了若干种可切换的并行策略。那么首先,我们就来理解一下Tutel的并行策略。
Tutel考虑了所有DP(数据并行),MP(模型并行)和EP(专家并行)的组合,并分析它们的通信复杂度,最终选择了最优的两种:DP和EP+DP+MP。
其中\(C_g\)是每个expert的容量(处理token的数量),\(P\)是所有expert的总参数量,\(W\)是GPU数量,\(E\)是expert数量,\(r\)为MP的度数。

我们再看图理解一下这两种并行策略
DP

Tutel的DP沿用了ZeRO-DP。关于ZeRO-DP的理解可以参考我之前的博客:ZeRO-DP技术简析。
简单来说,ZeRO-DP在前向对模型参数进行all-gather,反向对梯度进行reduce-scatter,这样避免了在每个GPU上都保存所有模型,造成冗余的保存(主要是优化器状态),导致显存浪费。ZeRO-DP的通信量是\(2P\)。
EP+DP+MP
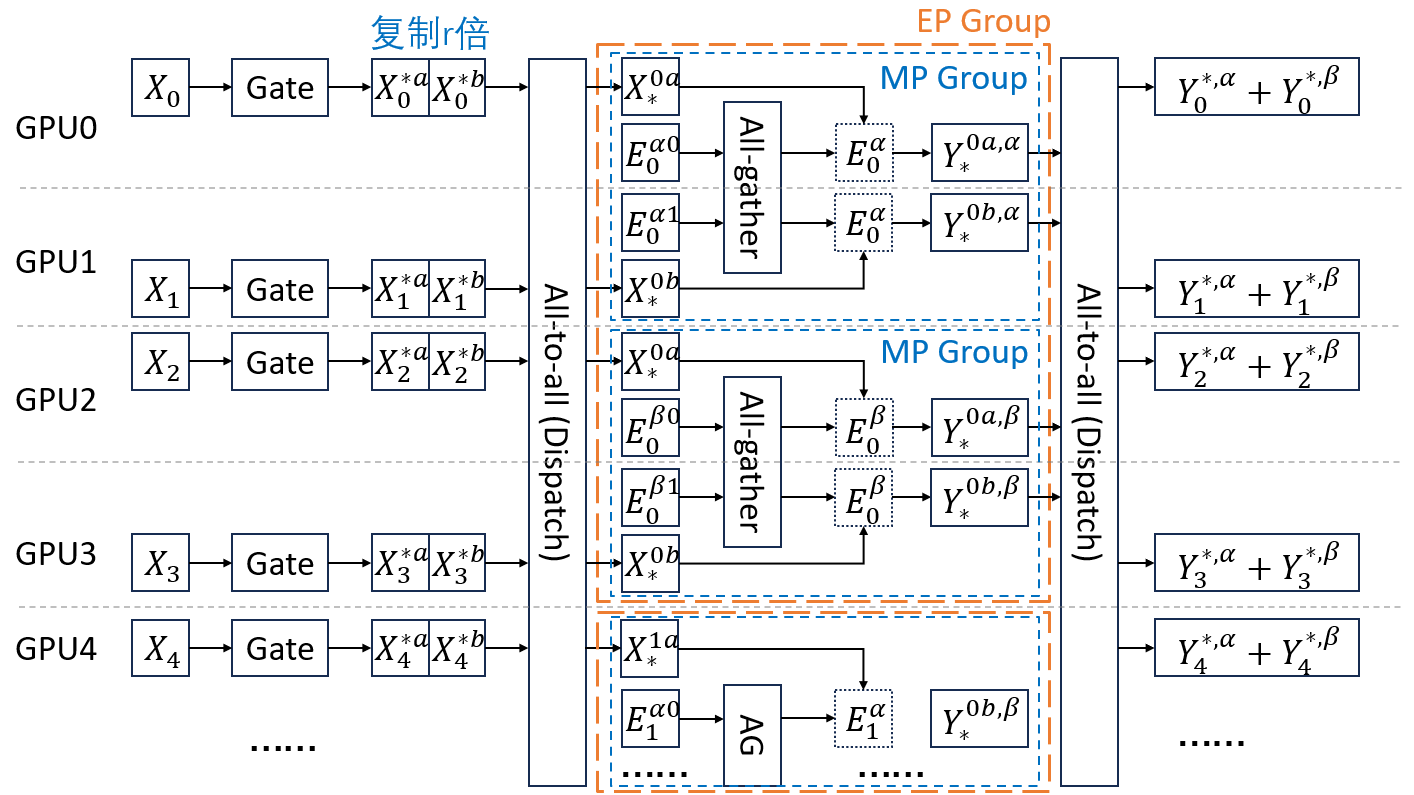
EP+DP+MP就复杂很多了。由于原论文的图有点过于简略,我这里手动画了一个图。图中\(W=8,E=2,r=2\),图里只画了前5个GPU。
其中\(X\)表示输入数据。\(X_i\)是第\(i\)个GPU上的输入数据。\(X_i^{j}\)为原本在第\(i\)个GPU上,要发往第\(j\)个expert的处理的数据。为了实现MP,Tutel把数据复制了\(r\)份。因为这里\(r=2\),所以将\(X_i^j\)复制为\(X_i^{ja}\)和\(X_i^{jb}\)。
\(E\)表示expert,其中\(E_i\)为第\(i\)个expert。图中\(W/E=4\),所以Tutel将一个模型切成4块,即将\(E_0\)切成\(E_0^{\alpha0}, E_0^{\alpha1}, E_0^{\beta0},E_0^{\beta1}\)。又由于\(r=2\),所以要把这4块分成2组做MP,即\([E_0^{\alpha0}, E_0^{\alpha1}]\)一组,\([E_0^{\beta0},E_0^{\beta1}]\)一组。在每个MP组内部,还要做ZeRO-DP,即在前向传播时,\(E_0^{\alpha0}, E_0^{\alpha1}\)进行all-gather,得到\(E_0^{\alpha}\)。
由于引入了EP,所以在前向,需要先经过Gate,决定每个token发往哪个expert,接着进行all-to-all(dispatch),将token发往指定的expert,在expert计算完成后,再进行all-to-all(combine),将token发回原来的位置。
复杂度:在前向和反向各需要两次all-to-all,又由于数据被复制了\(r\)倍,所以开销是\(4C_gr\)。另外,由于引入了EP和MP,all-gather的规模缩小了\(E\times r\)倍,所以开销是\(P/E/r\)。因此总通信量是\(4C_gr+2P/E/r\)。
注意到在上面两张图中,每个GPU保存的模型参数是相同的,因此Tutel可以实现无缝切换并行策略。只需修改参数\(r\)即可:

PP
关于Pipeline Paralism,Tutel的处理方法如下

MoE的PP与传统PP的一个主要区别在于:传统的PP是以层为粒度的;而MoE的PP要比层更细,是在层内的Dispatch-FFN-Combine之间做PP。因此体现在代码上面,传统的PP直接调度不同层就可以了,不用改每层的逻辑;但MoE的PP必须要写在层内的处理逻辑里,看起来会稍微麻烦一些。
代码阅读
API
首先看一下Tutel的API,看看一下大致有哪些参数
* Usage of MOELayer Args:gate_type : 对gate的描述gate_type : dict-type gate description, e.g. {'type': 'top', 'k': 2, 'capacity_factor': -1.5, ..},or a list of dict-type gate descriptions, e.g. [{'type': 'top', 'k', 2}, {'type': 'top', 'k', 2}],the value of k in top-gating can be also negative, like -2, which indicates one GPU will hold 1/(-k) parameters of an expertcapacity_factor X can be positive (factor = X), zero (factor = max(needed_volumes)) or negative (factor = min(-X, max(needed_volumes))).model_dim : MoE输入的维度model_dim : the number of channels for MOE's input tensorexperts : 对expert的描述,具体选项在下面experts : a dict-type config for builtin expert networkscan_expert_func : 在初始化时,对expert的每个参数执行此函数scan_expert_func : allow users to specify a lambda function to iterate each experts param, e.g. `scan_expert_func = lambda name, param: setattr(param, 'expert', True)`result_func : 在forward末尾,对输出执行此函数result_func : allow users to specify a lambda function to format the MoE output and aux_loss, e.g. `result_func = lambda output: (output, output.l_aux)`group : all-to-all的worldgroup : specify the explicit communication group of all_to_allseeds : 种子,一个三元组seeds : a tuple containing a tripple of int to specify manual seed of (shared params, local params, others params after MoE's)a2a_ffn_overlap_degree : 对应上图中PP的度数a2a_ffn_overlap_degree : the value to control a2a overlap depth, 1 by default for no overlap, 2 for overlap a2a with half gemm, ..parallel_type : 并行策略,可以是'data', 'model', 'adaptive:x', 或者'auto'parallel_type : the parallel method to compute MoE, valid types: 'auto', 'data', 'model'pad_samples : deprecated* Usage of dict-type Experts Config:这些都比较好理解,就不解释了num_experts_per_device : the number of local experts per device (by default, the value is 1 if not specified)hidden_size_per_expert : the hidden size between two linear layers for each expert (used for type == 'ffn' only)type : available built-in experts implementation, e.g: ffnactivation_fn : the custom-defined activation function between two linear layers (used for type == 'ffn' only)has_fc1_bias : If set to False, the expert bias parameters `batched_fc1_bias` is disabled. Default: Truehas_fc2_bias : If set to False, the expert bias parameters `batched_fc2_bias` is disabled. Default: True
接着我们直接看主体部分,即MOELayer,代码位于 tutel/impls/moe_layer.py
Gate
首先一上来是Gate
def __init__(self, ...):# 初始化experts# 对于ffn,expert_module为fused_experts.ExpertModuleexpert_modules = expert_module(**experts)# 初始化gate# 对于gate_type为top-k的情况,single_gate具体用的是LinearTopKGategate_module = single_gate(model_dim=self.model_dim, num_global_experts=self.num_global_experts, **single_gate_type)def forward(self, input: Tensor, ...):# 记住最开始输入的形状original_shape, original_dtype = input.shape, input.dtypeassert len(original_shape) >= 2, "Input data must be at least 2D tensor: (s)amples, .., (m)odel_dim"# reserve_dims默认为1,用途为将输入数据x转换为2d,保持最后一个维度不变# 如(10, 20, 300) -> (200, 300)# 为了方便,我们记转换后的x形状为(s, h)x = input.reshape(-1, original_shape[-reserve_dims:].numel())# 定义路由函数def routing():# 经过gate# 我们记expert的数量为e,GPU数量为w# 则num_global_experts=e# 则logits形状为(s, e)logits = gctx(x)# 对logits加noise的结果求softmax,得到scoresscores = F.softmax(logits_w_noise, dim=1)# 省略一些对logits的处理# 默认self.sharded_count = self.world_size // self.num_global_experts# 代表每个expert被切块的数目# 这个切块要么用于ZeRO-DP,要么用于MP# 所以sharded_count*a2a_ffn_overlap_degree为每个expert的副本数量mega_up = max(megablocks_size, 1)alignment = (self.sharded_count * a2a_ffn_overlap_degree + mega_up - 1) // mega_up * mega_upif alignment > 256:alignment = (alignment + 127) // 128 * 128# extract_critical会计算出每一个token要发往的expert,以及在expert内的编号return logits.dtype, extract_critical(scores,top_k = top_k,loss_fn = _loss_fn,capacity_factor = capacity_factor or gctx.capacity_factor,batch_prioritized_routing = self.batch_prioritized_routing,normalize_gate = self.normalize_gate,group = self.group,alignment = alignment,inequivalent_tokens = inequivalent_tokens,)
这里有必要详细解释一下extract_critical函数
def extract_critical(scores, top_k, ...):# 对scores求topk的索引# topk_indices的形状为(s, k)topk_indices = torch.topk(scores, top_k, dim=1).indices# 将topk_indices转换为列表# indices_s长度为k的列表,每个元素是形状为s的tensorindices_s = [x.view(-1) for x in topk_indices.chunk(top_k, dim=1)]# 计算one-hot编码# masks_se中的每个元素是一个形状为(s, e)的tensor,# 若第i个token的t第1个expert是j,则对应masks_se的第1个元素的第(i, j)位是1;否则是0masks_se = [losses._one_hot_with_dtype(x, num_classes=num_global_experts, dtype=x.dtype) for x in indices_s]# gates_s的每个元素形状为(s)gates_s = [(scores * x).sum(dim=1) for x in masks_se]# top-k的lossl_loss = loss_fn(scores, topk_indices) if loss_fn is not None else None# 计算location,其中compute_location = fast_cumsum_sub_one,即对维度0求前缀和再减1# locations_s的元素形状为(s, e),其中(i,j)的值>=0表示token i是发往expert j的第几个tokenlocations1 = compute_location(masks_se[0])locations_s = [torch.sum(locations1 * masks_se[0], dim=1).to(torch.int32)]# 为top 1..k都计算locations_s,将结果求和if top_k > 1:acc_base = Nonefor k in range(1, top_k):# acc_base是这个expert的top0..k-1的token数量,形状为(1, e)acc_base = torch.sum(masks_se[k - 1], dim=0, keepdim=True) if acc_base is None else acc_base + torch.sum(masks_se[k - 1], dim=0, keepdim=True)locations2 = compute_location(masks_se[k])# locations_s的元素表示当前token的top-k是expert发往expert j的第几个token(考虑所有的top_k)locations2 += acc_baselocations_s.append(torch.sum(locations2 * masks_se[k], dim=1).to(torch.int32))locations2 = locations2[-1] + 1# num_samples = snum_samples = int(scores.size(0))samples_per_expert = (num_samples + num_global_experts - 1) // num_global_expertsif capacity_factor > 0:# 若capacity_factor>0,则根据capacity_factor计算每个expert的capicitycapacity = top_k * int(capacity_factor * samples_per_expert)else:# 若capacity_factor=0,expert的capicity是所有expert的capacity的最大值capacity = locations2.max()capacity = int(simple_all_reduce(capacity, group=group, op=torch.distributed.ReduceOp.MAX))if capacity_factor < 0:# 若capacity_factor>0,则capacity_factor是capicity的upper_boundcapacity = min(capacity, top_k * int(-capacity_factor * samples_per_expert))# 对齐到所有expert副本的数量remainder = capacity % alignmentif remainder > 0:capacity = capacity + alignment - remainderreturn (num_global_experts, indices_s, locations_s, gates_s, capacity, locations2), l_loss
Encode
继续看forward
def forward(self, input: Tensor, ...):# 在routing之后logits_dtype, (crit, l_aux) = routing()# fast_encode内部使用kernel进行encode操作# 用c代表expert的capacity。则encode后y的形状为(e, c, h)y = fast_encode(x.to(logits_dtype), crit, self.is_postscore).to(x.dtype)
接下来就和并行策略有关了
def forward(self, input: Tensor, ...): # 在encode之后if self.adaptive_degree == 0:# 只有DP,在前向不需要传任何东西y = self.expert_local(y, original_shape[-reserve_dims:])else:if self.auto_parallel:# 比较数据量和模型参数量,# 因为DP+EP通信量是4*数据量+2*参数量,若MP度数维r,则DP+EP+MP的通信量为# 4*数据量*r+2*参数量/r,所以如果2*数据量<参数量,而可以使用MPself.use_model_parallel = (y.numel() * (self.sharded_count - 1) * 2 < sum([x.numel() for x in self.experts.parameters()]))if self.num_global_experts < self.world_size:if self.use_model_parallel:# 记adaptive_degree=r(参照论文)。把数据复制r份# 即上面图中的[X_0^{0}]复制为[X_0^{0a},X_0^{0b},X_0^{0a},X_0^{0b}]# y的形状为(w, c*e*r/w, h)y = y.repeat(1, self.adaptive_degree, 1).view(self.world_size, -1, y.size(2))else:# 记world_size为w# 将y的形状改为(w, c*e/w, h)y = y.view(self.world_size, -1, y.size(2))if a2a_ffn_overlap_degree > 1 and y.is_cuda:def expert_fn(expert_input):return self.expert_local(expert_input, original_shape[-reserve_dims:])# 在all-to-all和FNN之间做overlapy = a2a_ffn_overlap_forward(y, expert_fn=expert_fn, a2a_ffn_overlap_degree=a2a_ffn_overlap_degree, use_2dh=self.use_2dh, group=self.group)else:# 不做overlapy = C.all_to_all(y, 1, 0, use_2dh=self.use_2dh, group=self.group)y = self.expert_local(y, original_shape[-reserve_dims:])y = C.all_to_all(y, 0, 1, use_2dh=self.use_2dh, group=self.group)if self.num_global_experts < self.world_size:if self.use_model_parallel:y = torch.sum(y.view(self.num_global_experts, self.adaptive_degree, -1, y.size(2)), dim=1)else:y = y.view(self.num_global_experts, -1, y.size(2))
接下来详细讲一讲两个all-to-all和expert_local的部分,为了方便,我们先从不做overlap的开始看,也不考虑2dh。
第一次all-to-all
在不做overlap的分支里,第一次all-to-all的内部如下
# 根据前文所讲,reshaped_input的形状是(max(e, w), -1, h)
reshaped_input = input
# 异步的调用pytorch的all_to_all_single函数,执行all-to-all
output, f_wait = simple_all_to_all(reshaped_input, group, background=True)
# all_to_all_single的接口如下
# def all_to_all_single(
# output,
# input,
# output_split_sizes=None,
# input_split_sizes=None,
# group=group.WORLD,
# ):"""Each process splits input tensor and then scatters the split list to all processes in a group.Then concatenate the received tensors from all the processes in the group and return single output tensor.Arguments:output (Tensor): Gathered concatenated output tensor.input (Tensor): Input tensor to scatter.output_split_sizes: (list[Int], optional): Output split sizes for dim 0if specified None or empty, dim 0 of ``output`` tensor must divideequally by ``world_size``.input_split_sizes: (list[Int], optional): Input split sizes for dim 0if specified None or empty, dim 0 of ``input`` tensor must divideequally by ``world_size``.Returns:Tensor: Output of the collective."""
# 在Tutel调用all_to_all_single时,并没有指定output_split_sizes和input_split_sizes
# 也就是说all-to-all是直接按照第0个维度进行的
# 在all_to_all_single之后,output的形状还是(max(e, w), -1, h),
# 只不过第0维的意义不再是``发往哪个expert/GPU'',而是``来自哪个expert/GPU''def f_async():# 等待all-to-all结束f_wait()# local_input = outputlocal_input = RestoreBackward.apply(output, reshaped_input)# 将local_input的形状变为(w, num_local_experts, -1, h)# 其中num_local_experts=max(e/w, 1)local_input = local_input.view([world_size, -1] + list(local_input.shape[1:]))# 这里input_dim=1# 作用是将local_input的前两个维度对调,形状变为(num_local_experts, w, -1, h)local_input = local_input.permute(list(range(1, input_dim + 1)) + [0] + list(range(input_dim + 1, local_input.dim())))# 将local_input的形状变为(num_local_experts, -1, h)local_input = local_input.contiguous().view(list(local_input.shape[:input_dim]) + [-1] + list(local_input.shape[input_dim + 2:]))return local_input# 异步执行上述过程
return f_async
Expert
expert_local内容如下
def expert_local(self, x, reserve_shape):# 输入形状为(num_local_experts, -1, h)y = self.experts(x.view(x.size(0), x.size(1), *reserve_shape), self)self.protected_shape = y.shape# 输出形状为(num_local_experts, -1, h)return y.reshape(y.size(0), y.size(1), -1)
我们一会再看expert内的细节,先继续往下。
第二次all-to-all
紧接着是第二个all-to-all
# 输入形状为(num_local_experts, -1, h)
# 这里output_dim=1
# reshaped_input形状为(num_local_experts, w, -1, h)
reshaped_input = input.view(list(input.shape[:output_dim]) + [world_size, -1] + list(input.shape[output_dim + 1:]))
# 将reshaped_input前两个维度对调,形状变为(w, num_local_experts, -1, h)
reshaped_input = reshaped_input.permute([output_dim] + list(range(output_dim)) + list(range(output_dim + 1, reshaped_input.dim())))
# 进行simple_all_to_all
output, f_wait = simple_all_to_all(reshaped_input, group, background=True)def f_async():f_wait()local_input = RestoreBackward.apply(output, reshaped_input)# 将local_input形状变为(max(w, e), -1, h)local_input = local_input.view([-1] + list(local_input.shape[2:]))return local_inputreturn f_async
Decode
再回到forward函数,最后是decode
def forward(self, input: Tensor, ...):# 在[all-to-all, FFN, all-to-all]之后# 使用kernel进行decode# decode之后y的形状为(-1, h)y = fast_decode(y.to(logits_dtype), crit, self.is_postscore)# 将输出的形状变得与最开始输入的形状相同y = y.view(list(original_shape[:-reserve_dims]) + list(self.protected_shape[-reserve_dims:])).to(original_dtype)self.l_aux = y.l_aux = l_auxreturn self.result_func(y) if self.result_func is not None else y
到目前为止,MOELayer的流程我们已经走下来了,其中每个tensor的形状我们也都大致了解了。不过,我们还没有讲两个东西:
expert_local中,expert究竟是如何执行的。因为Tutel使用了ZeRO-DP,所以在前向传播时,要对expert参数进行all-gather。这部分的逻辑不在MOELayer中,而是在expert内部。a2a_ffn_overlap_forward是如何实现PP的。
Expert内部逻辑
Tutel默认的expert是FusedExpertsNetwork,我们简单看一下它的结构
class FusedExpertsNetwork(torch.nn.Module):def __init__(self, model_dim, hidden_size_per_expert, num_experts_per_device, sharded_count, activation_fn=None, activation_fn_with_self=None, output_dim=None, has_fc1_bias=True, has_fc2_bias=True):# 模型为两层FFN,其中沿着中间的隐藏层切成了sharded_count块self.hidden_size = hidden_size_per_expert // sharded_countfor i in range(num_experts_per_device):fc1 = torch.nn.Linear(self.model_dim, self.hidden_size)fc2 = torch.nn.Linear(self.hidden_size, self.output_dim)self.batched_fc1_w[i] = fc1.weightself.batched_fc1_bias[i] = fc1.biasself.batched_fc2_w[i] = fc2.weight.t()# 这里注意batched_fc2_bias作用于最终的输出,它的切块是沿着输出维度切的self.batched_fc2_bias[i] = fc2.bias[:((self.output_dim + sharded_count - 1) // sharded_count)]
然后来看它的forward函数
def forward(self, x, ctx):# 输入的x形状为(num_local_experts, -1, h)if ctx.adaptive_degree == 0:# 如果只有DP,那就是对所有的GPU进行all_gather# num_local_experts就是num_global_experts# zero_gather内部调用pytorch的all_gather,获取得到完整的fc1_wbatched_fc1_w = net.zero_gather(batched_fc1_w, group=ctx.group).view(ctx.num_global_experts, -1, batched_fc1_w.size(2))batched_fc2_w = net.zero_gather(batched_fc2_w, group=ctx.group).view(ctx.num_global_experts, -1, batched_fc2_w.size(2))if self.batched_fc1_bias is not None:batched_fc1_bias = net.zero_gather(batched_fc1_bias, group=ctx.group).view(ctx.num_global_experts, 1, -1)if self.batched_fc2_bias is not None:batched_fc2_bias = net.zero_gather(batched_fc2_bias, group=ctx.group).view(ctx.num_global_experts, 1, -1)else:# 否则,DP+EP+MPif ctx.sharded_count > 1:# 如果expert被切块了(因为ZeRO-DP或者MP)mesh_size = net.get_world_size(ctx.group)if mesh_size > 1 and mesh_size < net.get_world_size():ctx.adaptive_degree = ctx.sharded_countgroup_size = ctx.sharded_count // ctx.adaptive_degreeif group_size > 1:# expert因为DP而被切块,则这些块需要进行all-gather# 在前面图中的MP Group内部进行all-gather# 即合并E^{alpha0}和E^{alpha1}得到E^{alpha}ffn_zero_group = net.create_groups_from_world(group_count=-group_size, parent_group=ctx.group).model_groupbatched_fc1_w = net.zero_gather(batched_fc1_w, group=ffn_zero_group).view(1, -1, ctx.model_dim)batched_fc2_w = net.zero_gather(batched_fc2_w, group=ffn_zero_group).view(1, -1, self.output_dim)if self.batched_fc1_bias is not None:batched_fc1_bias = net.zero_gather(batched_fc1_bias, group=ffn_zero_group).view(1, 1, -1)if self.batched_fc2_bias is not None:# fc_bias2也要all-gather# 在前面图中的EP Group内部进行all-gather# 得到的是完整的fc_bias2batched_fc2_bias = net.zero_gather(batched_fc2_bias, group=net.create_groups_from_world(group_count=ctx.num_global_experts, parent_group=ctx.group).model_group)batched_fc2_bias = batched_fc2_bias.view(1, 1, -1)# 因为数据被复制了r份,所以fc2_bias也被加了r次# 为了使最后累加的y不变,这里把fc2_bias除以rif ctx.adaptive_degree > 1:batched_fc2_bias = torch.mul(batched_fc2_bias, 1.0 / ctx.adaptive_degree)# 进行计算y = torch.matmul(x, batched_fc1_w.permute(0, 2, 1))if self.batched_fc1_bias is not None:y = torch.add(y, batched_fc1_bias)y = self.activation_fn(y)y = torch.matmul(y, batched_fc2_w)if self.batched_fc2_bias is not None:y = torch.add(y, batched_fc2_bias)
All-gather的部分最好参照着前面的图理解一下。
PP实现
最后我们看a2a_ffn_overlap_forward函数。为了方便我们依然不考虑2dh。
def a2a_ffn_overlap_forward(input, expert_fn, a2a_ffn_overlap_degree, use_2dh, group):# input的形状为(max(e,w), -1, h)split_dim = 1# 设置AllToAllStatus.num_split = a2a_ffn_overlap_degree# 为了方便,我们记a2a_ffn_overlap_degree=p# 即PP沿着input的维度1切分,切成p块# init会初始化nccl环境C.AllToAllStatus.init(group, a2a_ffn_overlap_degree, split_dim)# 首先等待之前的计算任务完成# num_slices_per_split是input的第一维大小,即max(e, w)# num_slices_per_split = input.shape[:split_dim].numel()# length = input.nbytes();# num_slices = num_slices_per_split * num_split;# slice_size = length / num_slices;input_ready = C.CurrentStreamRelease.apply(input, 0)# 对于每一个PP块进行all-to-all操作# 具体来说,all-to-all是对每个expert都进行send-recv实现的# 在每一个PP块的操作后,都向cuda流中插入一个事件,用来检测这个块是否完成input_scattered_after_a2a = C.AllToAllScatterAsync.apply(input_ready)# 这段要从下往上看expert_output_scattered = [# 再插入一个事件iC.CurrentStreamRelease.apply(# 跟pre_expert_permute相反# 最终x的形状是(max(e, w), -1/p, h)C.post_expert_permute(# expert函数,前边已经讲过了expert_fn(# 跟前面的permute作用相同# 先把x拆成(w, max(e/w, 1), -1/p, h)# 再把前两位对调(max(e/w), w, -1/p, h)# 再把x变成(max(e/w), w*-1/p, h)C.pre_expert_permute(# 等待第i个事件完成C.CurrentStreamAcquire.apply(x,i),group=group)),group=group),i)# 枚举每一个PP块# 其中x是第i个块的输出,形状为(max(e,w), -1/p, h),即把input的维度1切成/p块for i, x in enumerate(input_scattered_after_a2a)]# 对于每个PP块,等待第i个事件,然后使用send-recv进行all-to-allexpert_output_gathered_after_a2a = C.AllToAllGatherAsync.apply(*expert_output_scattered)# 等待所有all-to-all完成input = C.CurrentStreamAcquire.apply(expert_output_gathered_after_a2a, 0)return input
backward跟forward流程差不多,这里就不讲了。