MODULE MainModule
PROC Main()
WHILE TRUE DO MoveJ pHome, v1000, z50, tool0;Place_1:SearchL\Stop, di_Crash1\NegFlank, pfound1, Offs(pPlace,0,0,0), v100, tGriper\WObj:=CurWobj;//NegFlank信号取反,从pfound1开始检测到pPlace点位 IF di_Crash1 =0 THEN GOTO Place_2;//碰撞到了,跳转到回退处理行ENDIF
Place_2:IF di_Crash1 =0 THEN //判断是否有碰撞,避免误入程序pfound1:=CRobT(\Tool:=tGriper\WObj:=CurWobj);MoveL offs(pfound1,0,0,100), vMidLoad, fine, tGriper\WObj:=CurWobj;//回退100Setgo go_Error, 1;//给PLC报错PulseDO\PLength:=1,do_RobError;Stop;Setgo go_Error, 0;GOTO Place_1;//再启动时再次进入运动程序ENDIFENDWHILE
ENDPROC
abb机器人碰撞回退程序
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.hqwc.cn/news/901097.html
如若内容造成侵权/违法违规/事实不符,请联系编程知识网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

HTML打包工具EXE工具一机一码激活码计算器小程序版
近期我们收到一些HTML一键打包EXE工具老用户反馈, 他们在使用一机一码离线功能的时候, 遇到如下的问题:外调试时突然需要激活码,手边没电脑急死人!客户现场网络受限,手机能操作就好了每次都要开电脑太麻烦,能移动端解决吗?
解决方案
针对用户集中反馈的"离线激活码…
20222227 实验一《Python程序设计》实验报告
20222227 2024-2025-2 《Python程序设计》实验一报告
课程:《Python程序设计》
班级: 2222
姓名: 赫连紫阳
学号: 20222227
实验教师:王志强
实验日期:2025年3月12日
必修/选修: 公选课
一、实验内容
1.熟悉Python开发环境;
2.练习Python运行、调试技能;(编写书中的…
【STM32】超好用的开源按键状态系统lwbtn,以及超详细的移植教程
在 button_event_handler 按钮事件处理函数中,按键按下分为:按下,释放;按下类型又分为:单击、双击、持续按下。
这每一个状态/事件,进行过后,其都会进行一次回调,即回到主函数一次,故也是分为了1、按下 2、释放 3、单击 4、双击 5、持续按下 五个回调状态。
你可以在 …
![rp2040笔记[1]-使用embassy实现呼吸灯并通过命令行切换状态](https://img2024.cnblogs.com/blog/1048201/202503/1048201-20250318200821899-101119469.png)
rp2040笔记[1]-使用embassy实现呼吸灯并通过命令行切换状态
使用rust的embassy在rp2040芯片核心板实现呼吸灯.摘要
使用rust的embassy在rp2040芯片核心板实现呼吸灯.
关键词
rust;embassy;rp2040;blink;pwm;
关键信息项目地址:[https://github.com/ByeIO/byeefree.rp2040_quad.embassy][package]
edition = "2021"
name = &quo…
014 登入页-Element-Plus的图标引入和使用
1、安装图标
2、使用
这里我们用全局注册的方法 放到这里
现在我们换一种方式
在src文件夹里面
新建文件夹global,都是一些全局的东西(这个就叫全局注册)
新建文件register-icons.ts (注册图标)这页这样写这段代码是使用 JavaScript(或可能是 TypeScript,从 app: any…
20242405 实验一《Python程序设计》实验报告
20242405 2024-2025-2 《Python程序设计》实验一报告
课程:《Python程序设计》
班级: 2424
姓名: 孙煜麟
学号:20242405
实验教师:王志强
实验日期:2025年3月12日
必修/选修: 公选课
1.实验内容
1.熟悉Python开发环境;
2.练习Python运行、调试技能
3.编写程序,练习…
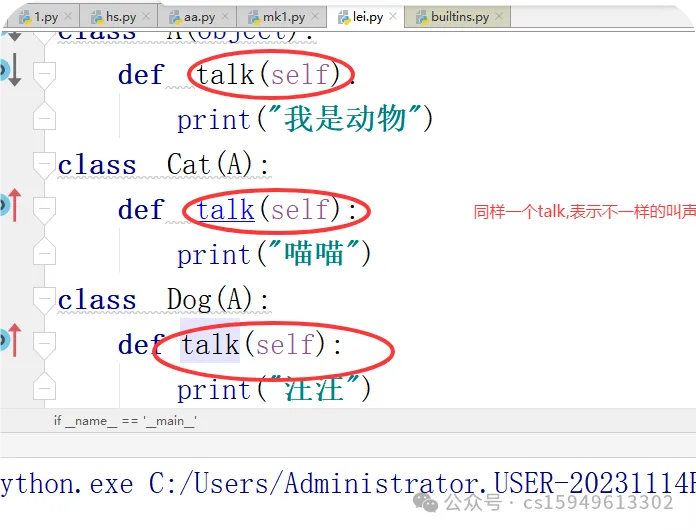
day:24 python——类的三大特性
python三大特性:封装,多态,继承
一、封装:
1、封装:封装就是隐藏对象一些不希望外部所访问到的属性和方法,保证安全
2、概念:指的是在设计时,不对外提供,隐藏起来,提供公共方法以外对其方法就是把属性和方法封装到一个抽象的类中,
3、封装相当于一个黑盒子,我们将事务相…
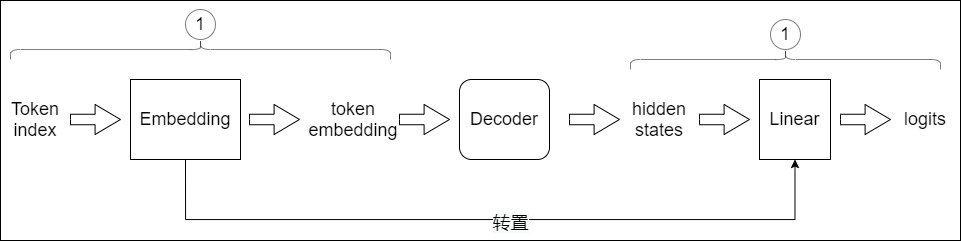
探秘Transformer系列之(15)--- 采样和输出
从零开始解析Transformer,目标是:(1) 解析Transformer如何运作,以及为何如此运作,让新同学可以入门;(2) 力争融入一些比较新的或者有特色的论文或者理念,让老鸟也可以有所收获。探秘Transformer系列之(15)--- 采样和输出
目录探秘Transformer系列之(15)--- 采样和输出…
c语言02_数据类型上
一、c是怎么变成汇编的
1、裸函数是编译器不管的
⑴写一个空函数(里面什么都不写),f7f5打开反汇编f11打开jmp什么都没写里面还是有一大堆(是编译器和连接器做的)⑵裸函数f7f5查看反汇编找到调用的函数0040D708f11打开再f11打开,里面一行汇编代码都没有⑶
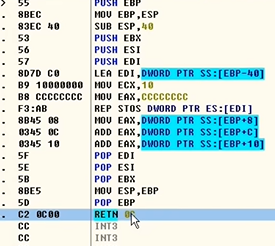
①空函数
f7f5运…

win11家庭版24H2,使用VMware虚拟机问题
一、安装VMware,提示 “安装程序检测到主机启用了 Hyper-v或 Device/credential Guard。。。”,我勾选了自动安装WHP后点击下一步,完成了VMware的安装。二、解压了一个虚拟机,用VMware打开并选择已复制虚拟机,出现“此平台不支持虚拟化”的错误,点击“是”也无法打开虚拟…