1.机器人运行逻辑
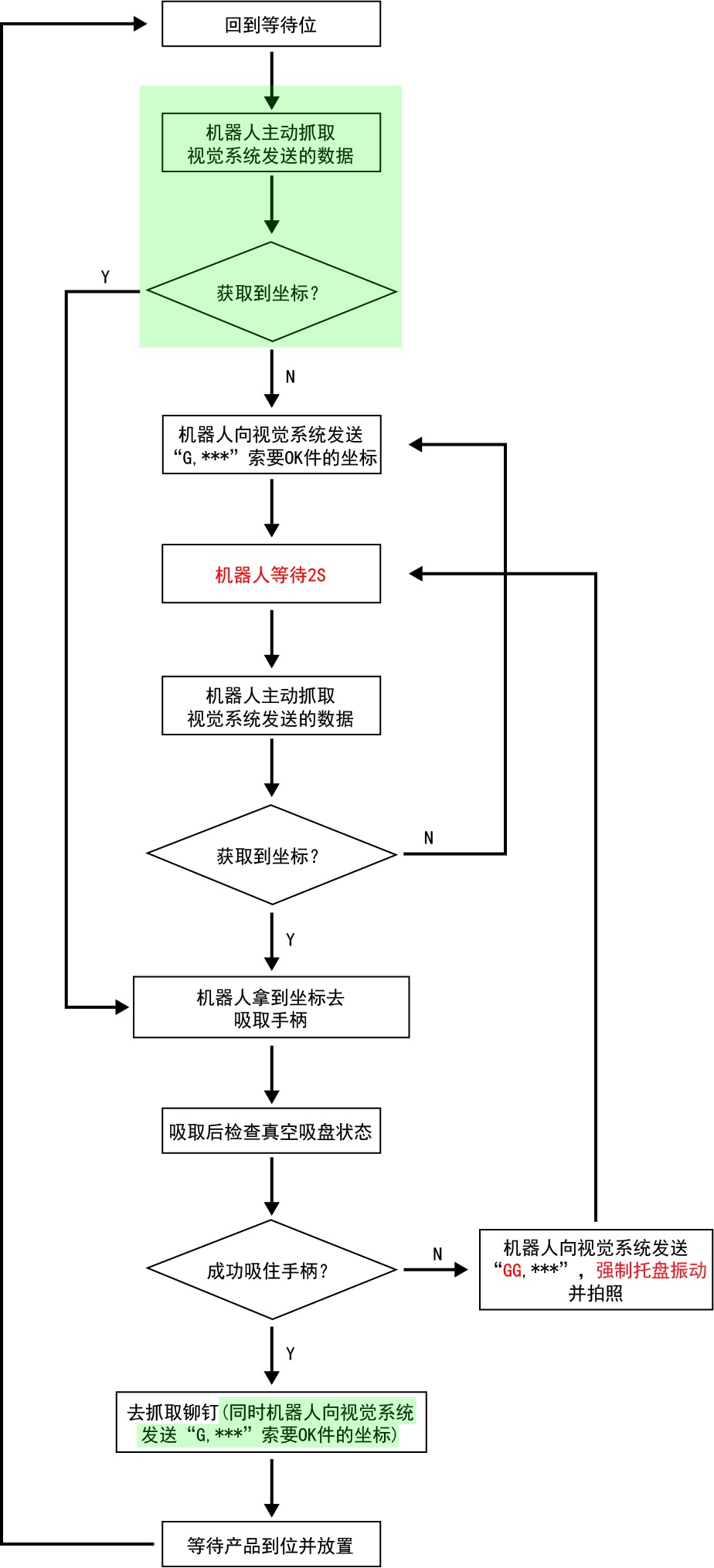
主体逻辑就是PLC发送取料指令后,机器人向柔性振动系统索要OK件的坐标-->柔性振动系统接收到指令后拍照,识别出OK件就发送其坐标,找不到OK件就振动一下再拍照-->机器人通过获取到的坐标去取料-->取料后检查真空吸盘负压信号,如果吸住了即取料成功,如果没吸住,就强制要求柔性振动盘先振动再拍照(而不是先拍照,以免再次去吸刚刚那个位置吸不住的件)。
2.柔性振动系统运行逻辑
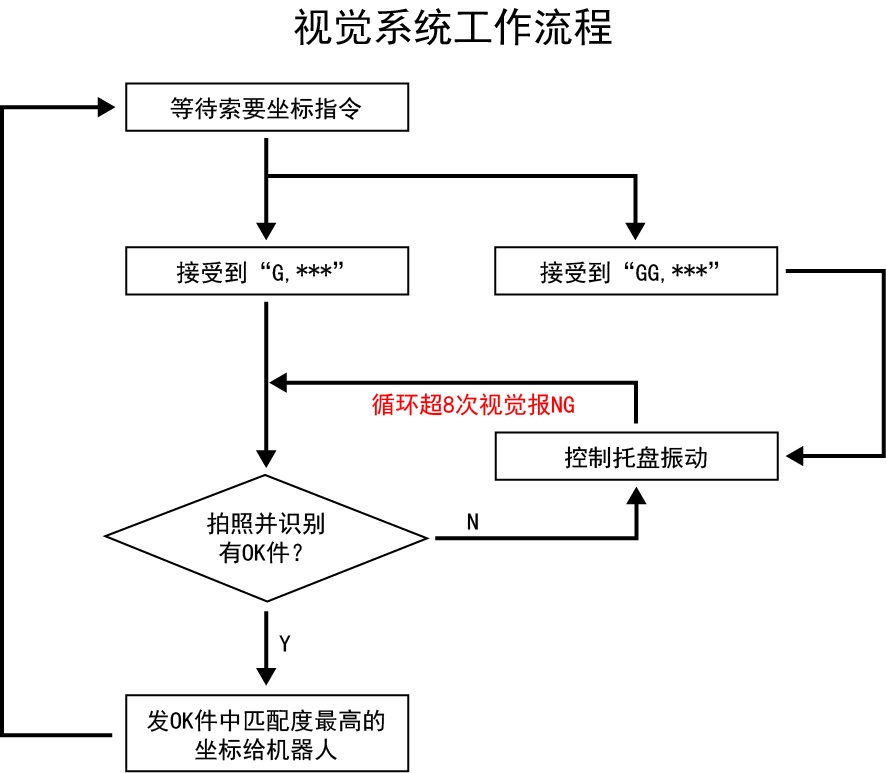
上面提到如果真空吸盘没吸住,就强制要求柔性振动盘先振动再拍照。就是因为每次拍照都是“发OK件中匹配度最高的坐标给机器人”,不先振动一下的话,下次发的坐标还是那个吸不住的零件坐标。