上一篇文章中: 手撕ch7/pose_estimation_3d2d(1),我们调用了epnp的方法进行位姿估计,这里我们使用非线性优化的方法来求解位姿,使用g2o进行BA优化
首先介绍g2o:可参考:g2o详细介绍
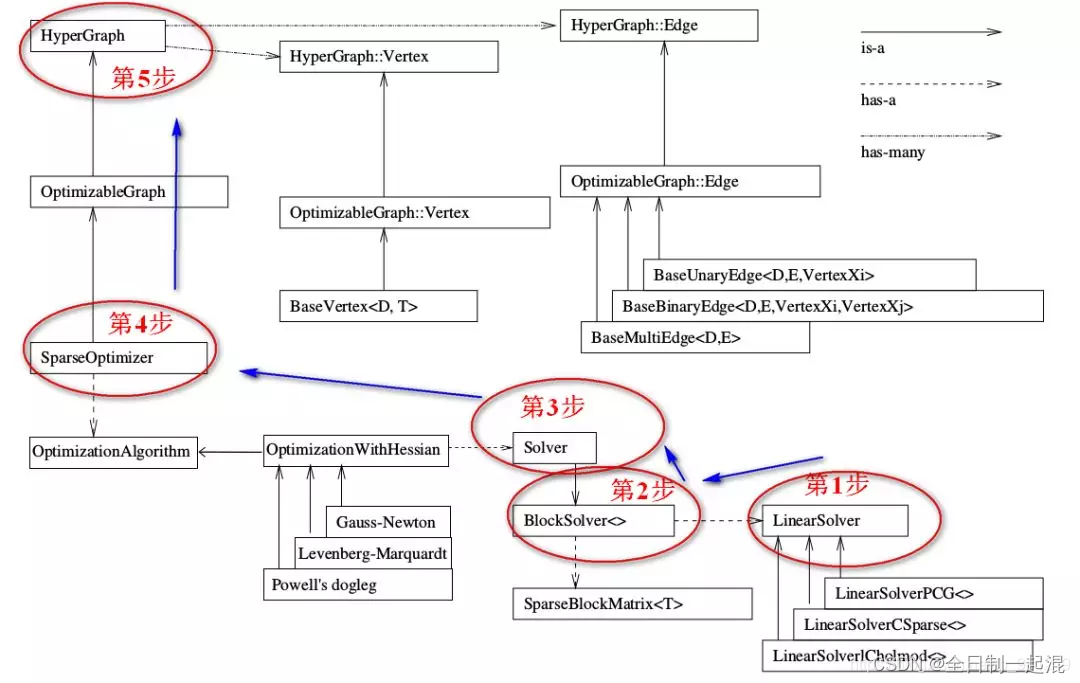
1.构建g2o图优化思路:
- 步骤一: 创建线性方程求解器,确定分解方法
// 每个误差项优化变量维度为3,误差值维度为1
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block;
// 创建一个线性求解器 LinearSolver,采用 dense cholesky 分解法
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>();
- 步骤二: 构造线性方程的矩阵块,并用上面定义的线性求解器初始化
Block* solver_ptr = new Block( linearSolver );
BlockSolver 内部包含 LinearSolver,用上面定义的线性求解器 LinearSolver 来初始化,前面已经给定了优化变量的维度;
- 步骤三: 创建总求解器 solver,并从 GN, LM, DogLeg 中选一个,再用上述块求解器 BlockSolver 初始化
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
- 步骤四: 创建稀疏优化器(SparseOptimizer)
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 用前面定义好的求解器作为求解方法:
optimizer.setVerbose( true ); // 打开调试输出
- 步骤五: 定义图的顶点和边,并添加到 SparseOptimizer 优化器中
// 创建一个顶点
CurveFittingVertex* v = new CurveFittingVertex();
// 初始化顶点的值
v->setEstimate( Eigen::Vector3d(0,0,0) );
// 设置顶点的编号
v->setId(0);
// 向图中添加顶点
optimizer.addVertex( v );for ( int i=0; i<N; i++ ) // 往图中增加边
{// 创建一条边CurveFittingEdge* edge = new CurveFittingEdge( x_data[i] );// 设置边的 idedge->setId(i);// 设置边连接的顶点edge->setVertex( 0, v ); // 设置观测数值edge->setMeasurement( y_data[i] ); // 设置信息矩阵:协方差矩阵之逆edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) ); // 将边添加到图中optimizer.addEdge( edge );
}
- 步骤六: 设置优化参数,开始执行优化
optimizer.initializeOptimization();
optimizer.optimize(100); // 迭代次数
对应原文完整代码如下:
void bundleAdjustmentG2O(const VecVector3d &points_3d,const VecVector2d &points_2d,const Mat &K,Sophus::SE3d &pose) {// 步骤一:构建图优化,先设定g2otypedef g2o::BlockSolver<g2o::BlockSolverTraits<6, 3>> BlockSolverType; // pose is 6, landmark is 3//步骤二: 线性求解器类型typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; //步骤三: 梯度下降方法,可以从GN, LM, DogLeg 中选auto solver = new g2o::OptimizationAlgorithmGaussNewton(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));//步骤四: 创建稀疏优化器g2o::SparseOptimizer optimizer; // 图模型optimizer.setAlgorithm(solver); // 设置求解器optimizer.setVerbose(true); // 打开调试输出//步骤五: 定义图的顶点和边// vertex 定义顶点VertexPose *vertex_pose = new VertexPose(); // 定义 相机位姿 为顶点vertex_pose->setId(0);// 设置顶点的编号vertex_pose->setEstimate(Sophus::SE3d());// 初始化顶点的值optimizer.addVertex(vertex_pose);// 向图中添加顶点// K 相机内参Eigen::Matrix3d K_eigen;K_eigen <<K.at<double>(0, 0), K.at<double>(0, 1), K.at<double>(0, 2),K.at<double>(1, 0), K.at<double>(1, 1), K.at<double>(1, 2),K.at<double>(2, 0), K.at<double>(2, 1), K.at<double>(2, 2);// edges 定义 边int index = 1;// 往图中增加边for (size_t i = 0; i < points_2d.size(); ++i) {auto p2d = points_2d[i];auto p3d = points_3d[i];EdgeProjection *edge = new EdgeProjection(p3d, K_eigen);// 创建一条边edge->setId(index);// 设置边的 idedge->setVertex(0, vertex_pose);// 设置边连接的顶点edge->setMeasurement(p2d); // 设置观测数值edge->setInformation(Eigen::Matrix2d::Identity());// 设置信息矩阵:协方差矩阵之逆optimizer.addEdge(edge);// 将边添加到图中index++;}//步骤六:设置优化参数,开始优化chrono::steady_clock::time_point t1 = chrono::steady_clock::now();optimizer.setVerbose(true);optimizer.initializeOptimization();// 设置优化初始值optimizer.optimize(10);// 迭代次数chrono::steady_clock::time_point t2 = chrono::steady_clock::now();chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>(t2 - t1);cout << "optimization costs time: " << time_used.count() << " seconds." << endl;cout << "pose estimated by g2o =\n" << vertex_pose->estimate().matrix() << endl;pose = vertex_pose->estimate();
}
其中我们需要关注如何定义顶点(Vertex)和边(edge)
2. 顶点(Vertex):
g2o 提供了一个比较通用的适合大多数情况的模板类 BaseVertex<D, T>,其中D 是 int 类型,表示顶点 Vertex 的最小维度,比如 3D 空间中旋转是 3 维的,那么这里 D=3;
但是在源码注释中说 D 并非是顶点(更确切的说是状态变量)的维度,而是其在流形空间(manifold)的最小表示(SO3->so3,SE3->se3).
T 是待估计 Vertex 的数据类型,比如用四元数表达三维旋转的话,T 就是 Quaternion 类型
我们自定义一个顶点需要重写以下函数
class myVertex: public g2::BaseVertex<Dim, Type>
{
public:// 类成员变量如果是固定大小对象需要加上以下的宏定义EIGEN_MAKE_ALIGNED_OPERATOR_NEW// 构造函数myVertex(){}// 读写函数virtual void read(std::istream& is) {}virtual void write(std::ostream& os) const {}// 重置函数virtual void setOriginImpl(){_estimate = Type();}// 更新函数virtual void oplusImpl(const double* update) override{_estimate += /*update*/;}
}
对应原文代码:
class VertexPose : public g2o::BaseVertex<6, Sophus::SE3d> { //优化变量是 6 自由度的李代数
public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW;//重置,设定被优化变量的原始值virtual void setToOriginImpl() override {_estimate = Sophus::SE3d();}/// left multiplication on SE3 //更新virtual void oplusImpl(const double *update) override {Eigen::Matrix<double, 6, 1> update_eigen;update_eigen << update[0], update[1], update[2], update[3], update[4], update[5];_estimate = Sophus::SE3d::exp(update_eigen) * _estimate; // 左乘更新 SE3 - 旋转矩阵R}virtual bool read(istream &in) override {} //存盘virtual bool write(ostream &out) const override {}//读盘
};3. 边(edge)
我们一般使用的类是 BaseUnaryEdge,BaseBinaryEdge,BaseMultiEdge 分别表示一元边,两元边,多元边(位于 g2o/g2o/core/base_edge.h 中),类似于顶点,他们又继承自OptimizableGraph::Edge (位于 g2o/g2o/core/optimizable_graph.h 中),hyper_graph::Edge(位于g2o/g2o/core/hyper_graph.h 中)
一元边表示只连接一个顶点,二元边表示连接两个顶点,多元边表示连接 3 个或以上顶点。
主要参数有:D, E, VertexXi, VertexXj
- D 是 int 型,表示测量值的维度;
- E 表示测量值的数据类型;
- VertexXi,VertexXj 分别表示不同顶点的类型。
自定义边需要重写以下成员函数:最重要的是误差计算函数computeError(),计算雅克比矩阵linearizeOplus() 两个函数
class myEdge: public g2o::BaseBinaryEdge<errorDim, errorType, Vertex1Type, Vertex2Type>
{public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW myEdge(){} // 读写函数virtual bool read(istream& in) {}virtual bool write(ostream& out) const {} // 误差计算函数virtual void computeError() override{// ..._error = _measurement - Something;} // 计算雅克比矩阵 virtual void linearizeOplus() override{_jacobianOplusXi(pos, pos) = something;// ... /*_jocobianOplusXj(pos, pos) = something;...*/} private:// data
}
对应原文代码:
// 仅估计位姿的一元边
class EdgeProjection : public g2o::BaseUnaryEdge<2, Eigen::Vector2d, VertexPose> {
public:EIGEN_MAKE_ALIGNED_OPERATOR_NEW;//构造函数EdgeProjection(const Eigen::Vector3d &pos, const Eigen::Matrix3d &K) : _pos3d(pos), _K(K) {}// 误差计算函数virtual void computeError() override {const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);Sophus::SE3d T = v->estimate();Eigen::Vector3d pos_pixel = _K * (T * _pos3d);//将3D世界坐标转为相机像素坐标pos_pixel /= pos_pixel[2];_error = _measurement - pos_pixel.head<2>(); //误差=测量值-投影得到的值}// 计算雅克比矩阵 virtual void linearizeOplus() override {const VertexPose *v = static_cast<VertexPose *> (_vertices[0]);Sophus::SE3d T = v->estimate();Eigen::Vector3d pos_cam = T * _pos3d;//相机坐标系下空间点的坐标=相机位姿 * 空间点的坐标double fx = _K(0, 0);double fy = _K(1, 1);double cx = _K(0, 2);double cy = _K(1, 2);double X = pos_cam[0];double Y = pos_cam[1];double Z = pos_cam[2];double Z2 = Z * Z;// 2*6的雅克比矩阵_jacobianOplusXi<< -fx / Z, 0, fx * X / Z2, fx * X * Y / Z2, -fx - fx * X * X / Z2, fx * Y / Z,0, -fy / Z, fy * Y / (Z * Z), fy + fy * Y * Y / Z2, -fy * X * Y / Z2, -fy * X / Z;}//读写操作virtual bool read(istream &in) override {}virtual bool write(ostream &out) const override {}private:Eigen::Vector3d _pos3d;Eigen::Matrix3d _K;
};