博主创建了一个科研互助群Q:772356582,欢迎大家加入讨论。这是一个科研互助群,主要围绕机器人,无人驾驶,无人机方面的感知定位,决策规划,以及论文发表经验,以方便大家很好很快的科研,少走弯路。欢迎在群里积极提问与回答,相互交流共同学习。
LSD_SLAM适配于ubuntu20.04修改过程的参考连接如下
Ubuntu20.04配置并运行LSD_SLAM,实测可行_nice-wyh的博客-CSDN博客
【已解决】/lib/x86_64-linux-gnu/libapr-1.so.0: undefined reference to `uuid_generate@UUID_1.0`_Mr.Winter`的博客-CSDN博客
博主将修改好的LSD_SLAM放到github上供大家使用,适用于18.04 20.04,可直接使用
https://github.com/huashu996/Ubuntu20.04LSD_SLAM
一、依赖
1.QT5
sudo apt-get install build-essentialsudo apt-get install qtbase5-dev qtchooser qt5-qmake qtbase5-dev-toolssudo apt-get install qtcreatorsudo apt-get install qt5*2.libQGLViewer-2.6.0
git clone git@github.com:GillesDebunne/libQGLViewer.gitcd libQGLViewer-2.6.0/QGLViewerqmakemakesudo make install二、拷贝代码编译
mkdir lsd_slamcd mkdirmkdir srccd srcgit clone git@github.com:huashu996/Ubuntu20.04LSD_SLAM.gitcd ..catkin make三、运行
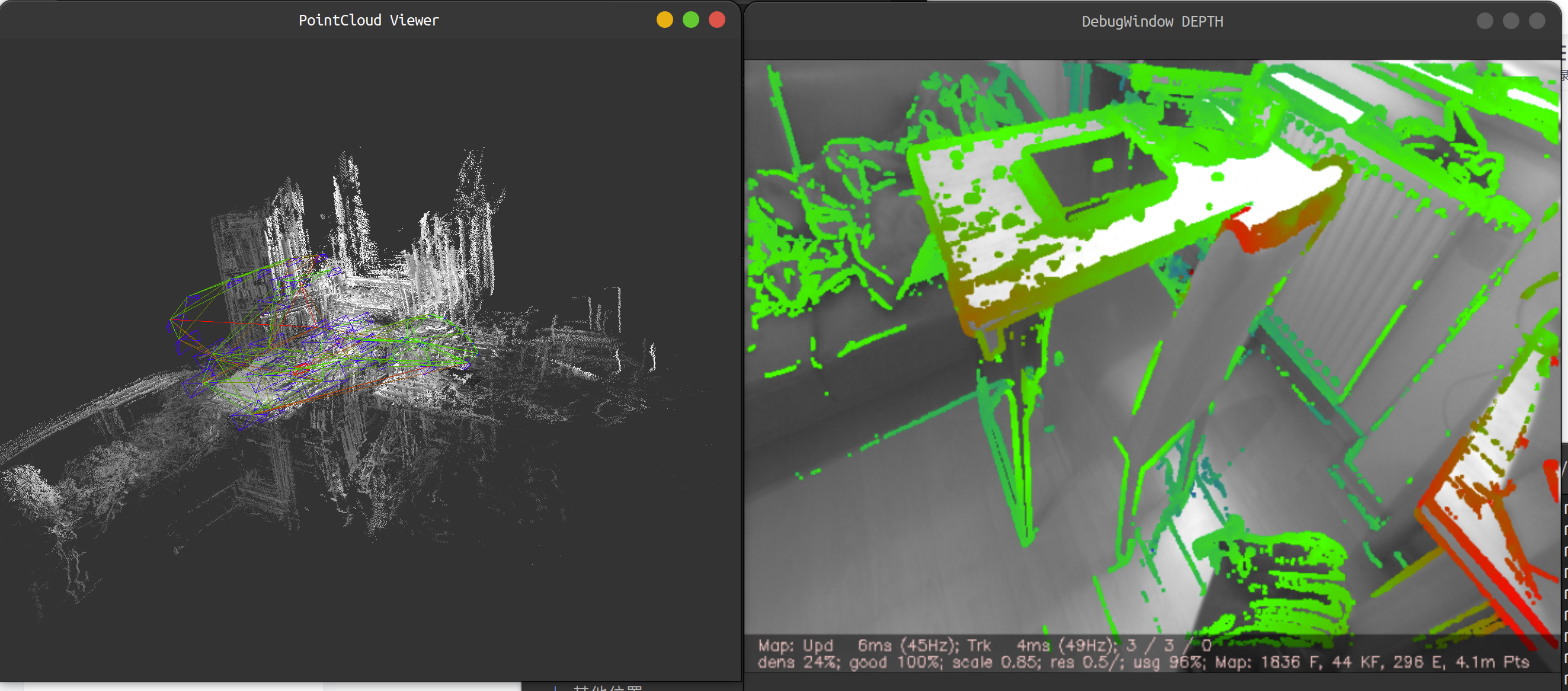
另起终端roscore另起终端source devel/setup.bash rosrun lsd_slam_viewer viewer另起终端source devel/setup.bashrosrun lsd_slam_core live_slam image:=/image_raw camera_info:=/camera_info另起终端 source devel/setup.bash rosbag play LSD_room_pc.bag