一、说明
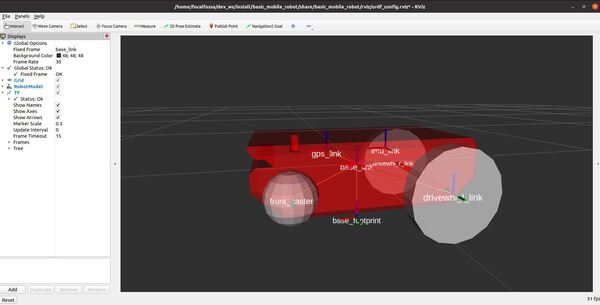
在本教程中,我将向您展示如何使用通用机器人描述格式 (URDF)(机器人建模的标准 ROS 格式)创建模拟移动机器人。

机器人专家喜欢在构建机器人之前对其进行模拟,以测试不同的算法。您可以想象,使用物理机器人犯错的成本可能很高(例如,将移动机器人高速撞到墙上意味着赔钱)。
二、本实验先决条件
- ROS 2 Foxy Fitzroy 安装在 Ubuntu Linux 20.04 上
- 如果您使用的是另一个 ROS 2 发行版,则需要将“foxy”替换为我在本教程中提到的“foxy”的发行版名称。
- 我强烈建议您获取最新版本的 ROS 2。如果您使用的是较新版本的 ROS 2,您仍然可以按照本教程中的所有步骤进行操作