🎬慕斯主页:修仙—别有洞天
💜本文前置知识: 搜索二叉树
♈️今日夜电波:Letter Song—ヲタみん
1:36━━━━━━️💟──────── 5:35
🔄 ◀️ ⏸ ▶️ ☰
💗关注👍点赞🙌收藏您的每一次鼓励都是对我莫大的支持😍
目录
一、前言
AVL树的概念
AVL树同二叉搜索树的异同
二、AVL树的实现
节点的定义
AVL树的初始化定义
AVL树的插入(重点及难点!!!)
插入大致步骤
根据规则找节点
插入并且链接节点
向上更新bf(平衡因子)的值
左单旋
右单旋
左右双旋
右左双旋
判断是否符合AVL树
三、整体代码
一、前言
本文是基于二叉搜索树的知识前提下对于AVL树进行叙述的,主要叙述的方面在于AVL树的插入方面,因为AVL树同二叉搜索树的最大区别就在于插入的操作和删除操作,删除操作也是类似的,但是难就难在更新平衡因子,后续会补上。而对于其他的操作如:二叉搜索树的查找操作等等都是相似的,因此本文主要介绍AVL树的插入操作。
AVL树的概念
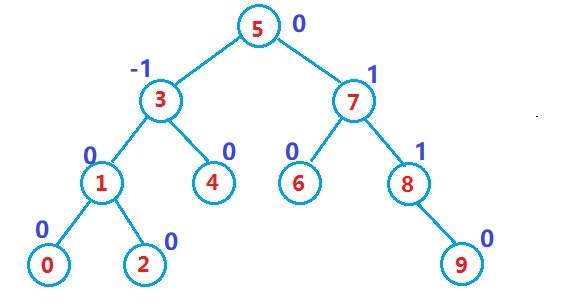
AVL树是一种自平衡二叉搜索树,它的特点是保证了每个节点的左右子树的高度差不超过1。它在插入和删除时会自动平衡,以保持树的高度始终在log N的范围内,从而保证了查找、插入、删除等操作的高效性。AVL树的名字来源于其发明者G.M.Adelson-Velsky和E.M.Landis的姓氏缩写。以下为一颗AVL树:
AVL树同二叉搜索树的异同
AVL树和二叉搜索树有很多相似之处,但也有许多不同之处。以下是它们的主要异同点:
相同点:
- 它们都是自平衡二叉搜索树,也就是说,在插入和删除节点后,它们能够保持一定的平衡性,从而保证查询操作的时间复杂度始终保持在O(logn)级别。
- 它们都遵循二叉搜索树的基本性质,即左子树中的所有节点都小于根节点,右子树中的所有节点都大于根节点。
不同点:
- 在AVL树中,除了左右子树高度差不能超过1之外,每个叶子节点还必须在左右子树的高度之间,而在二叉搜索树中则没有这样的限制。(AVL中通常定义一个bf值(balance factor)用于记录节点左右子树的高度差)
- 在AVL树中,任何路径上的节点数差异不能超过1,而在二叉搜索树中则没有这样的要求。
- 在插入和删除节点后,AVL树需要进行更多的旋转操作来恢复平衡,而二叉搜索树则不需要这样的步骤。
- AVL树更适合于查找操作,因为它通过严格的平衡性保证了查询操作的效率,而二叉搜索树更适合于插入和删除操作,因为它可以通过简单的旋转操作来快速调整树结构。
二、AVL树的实现
节点的定义
通过KV模型定义AVL树节点,定义三叉链的结构储存父节点以及左右子树节点的地址,定义了bf(平衡因子)用于记录节点右子树与左子树之差(右-左),通过构造函数初始化列表,特别要将bf置为0,如果不置0后续操作可能会出错(别问作者怎么知道的(〃>皿<))。
template<class K, class V>
struct AVLTreeNode
{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; // balance factorAVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}
};AVL树的初始化定义
// AVL: 二叉搜索树 + 平衡因子的限制
template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:// 在AVL树中插入节点bool Insert(const pair<K, V>& kv);// AVL树的验证bool _IsBalance(Node* root){return _IsBalance(_root);}private:// 右单旋void RotateR(Node* parent);// 左单旋void RotateL(Node* parent);// 右左双旋void RotateRL(Node* parent);// 左右双旋void RotateLR(Node* parent);// 求高度int _Height(Node* root );// 根据AVL树的概念验证pRoot是否为有效的AVL树bool _IsBalance(Node* root);private:Node* _root = nullptr;
};
AVL树的插入(重点及难点!!!)
插入大致步骤
AVL树的插入操作可以分为以下几步:
- 向AVL树中插入一个新节点,首先找到该节点的位置。这可以通过比较新节点的值与当前节点的值来完成,直到找到一个空位置或者到达一个叶子节点为止。按照大往左,小往右,相等返回false的规则。
- 依次向下搜索直到找到相应的位置,就将新节点插入到这个位置,并且更新该节点的父节点和兄弟节点的指针。就将新节点插入到这个位置,然后向上更新节点的bf值。
- 插入完成后,需要检查新插入的节点是否破坏了AVL树的平衡性。如果破坏了平衡性,就需要执行一系列旋转操作来修复不平衡状态。具体来说,如果新插入的节点使得某个分支的深度增加了一级,那么可以执行一次相应的旋转操作:左旋、右旋、左右旋、右左旋,最后按要求更新各个节点的bf值。
以上就是AVL树的插入操作步骤。需要注意的是,每次插入操作都需要按照这些步骤来进行,才能保证AVL树的平衡性。
根据规则找节点
如果_root为空(即空树)则新建节点并返回。比较节点的值,如果插入节点大则往右子树遍历,小则往左子树遍历,如果与节点值相同则无需插入直接返回。后续找到相应的位置后就可跳出循环进行下一步操作。
if (_root == nullptr)
{_root = new Node(kv);return true;
}Node* parent = nullptr;
Node* cur = _root;while (cur)
{if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}
}插入并且链接节点
更新节点信息,新插入节点的_parent值,以及父节点链接他在左子树还是右子树的判断,链入AVL树中。
cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}向上更新bf(平衡因子)的值
在插入之前,parent的平衡因子分为三种情况:-1,0, 1, 分以下两种情况:
1. 如果cur插入到parent的左侧,只需给parent的平衡因子-1即可。
2. 如果cur插入到parent的右侧,只需给parent的平衡因子+1即可。
此时:parent的平衡因子可能有三种情况:0,正负1, 正负2
1. 如果parent的平衡因子为0,说明插入之前parent的平衡因子为正负1,插入后被调整成0,此时满足AVL树的性质,插入成功。
2. 如果parent的平衡因子为正负1,说明插入前parent的平衡因子一定为0,插入后被更新成正负1,此时以parent为根的树的高度增加,需要继续向上更新。
3. 如果parent的平衡因子为正负2,则parent的平衡因子违反平衡树的性质,需要对其进行旋转处理。
while (parent)
{if (cur == parent->_left)//根据在左还是右改变bf值{parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0)//bf=0则向上都无需变化{break;}else if (parent->_bf == 1 || parent->_bf == -1)//bf变化向上遍历改变bf值{cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2)//破坏了bf值需要-1<=bf<=1的区间,需要旋转矫正{if (parent->_bf == 2 && cur->_bf == 1)//左旋情况{RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1)//右旋情况{RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == -1)//右旋再左旋情况{RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == 1)//左旋再右旋情况{RotateLR(parent);}// 1、旋转让这颗子树平衡了// 2、旋转降低了这颗子树的高度,恢复到跟插入前一样的高度,所以对上一层没有影响,不用继续更新break;}else{assert(false);//其它情况的bf值表示这颗avl树本身就有问题}
}左单旋
由于我们每次插入都会进行调整操作,对此AVL树在新的节点插入前都是合法的,也就是说bf值只会在-1~1之间波动。 当 parent->_bf == 2 && cur->_bf == 1时,我们需要进行左单旋的操作以确保AVL树的合法性(也就是当父节点的右子树高时需要进行左单旋),以下为对此以下为大致的操作图:
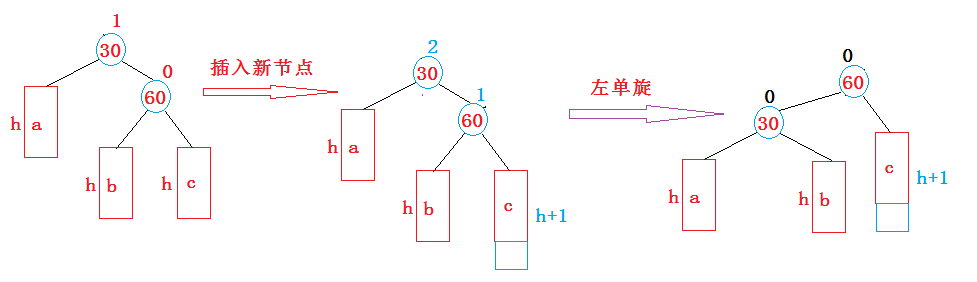
详细旋转过程:
对于左单旋操作,我们需要先记录几个节点,分别如下为parent、subR、subRL,因为我们主要是改变这三个的位置。在旋转完成后我们也通过图清晰可见,parent和subR的bf值都是0。

void RotateL(Node* parent)//左旋{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* parentParent = parent->_parent;parent->_parent = subR;if (subRL)//判断节点subRL是否为空,防止出错subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}parent->_bf = subR->_bf = 0;}右单旋
对于右单旋,操作同左单旋相似,也是需要记录三个节点:parent、subL、subLR,只不过此时我们是向右旋转。当 parent->_bf == -2 && cur->_bf == -1时,我们需要进行右单旋的操作以确保AVL树的合法性(也就是当父节点的左子树高时需要进行右单旋)。在旋转完成后我们也通过图清晰可见,parent和subR的bf值都是0。以下为对此以下为大致的操作图:

void RotateR(Node* parent)//右旋{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* parentParent = parent->_parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}parent->_bf = subL->_bf = 0;}左右双旋
当parent->_bf == -2 && cur->_bf == 1时,也就意味着我们的插入操作在如下的b的位置,插入后的图为第二张图,对此我们仅仅只进行一次旋转是远远不够的,如下第三张图为以30为父节点(即subL)只进行了一次左单旋后所变化的图,如果我们仔细观察可以发现这非常符合需要右单旋的操作,因此,此时我们以90为父节点再进行一次右单旋操作。 当然双旋最重要的其实是bf值的确定,我们需要根据最开始的subLR的bf值来确定。
当bf == 0,则subLR自己就是新增因此
parent->_bf = subL->_bf = subLR->_bf = 0;当bf==-1,则subLR的左子树新增
parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;当bf==1,则subLR的右子树新增
subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;

void RotateLR(Node* parent){//...Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){// subLR自己就是新增parent->_bf = subL->_bf = subLR->_bf = 0;}else if (bf == -1){// subLR的左子树新增parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 1){// subLR的右子树新增subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;}else{assert(false);}}右左双旋
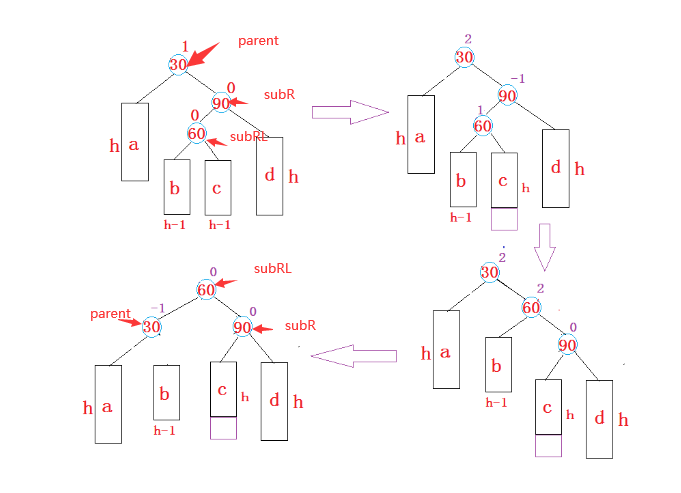
当parent->_bf == 2 && cur->_bf == -1时,我们需要进行右左双旋操作,当然同左右双旋一样,只进行一次旋转肯定是不够的,我们也可以猜到先对subR作为一次父节点进行右单旋,在再对parent进行左单旋。
当然双旋最重要的其实是bf值的确定,我们需要根据最开始的subRL的bf值来确定。
当bf == 0,则subRL自己就是新增
parent->_bf = subR->_bf = subRL->_bf = 0;当bf==-1,则subRL的左子树新增
parent->_bf = 0;subRL->_bf = 0;subR->_bf = 1;当bf==1,则subRL的右子树新增
parent->_bf = -1;subRL->_bf = 0;subR->_bf = 0;
void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){// subRL自己就是新增parent->_bf = subR->_bf = subRL->_bf = 0;}else if (bf == -1){// subRL的左子树新增parent->_bf = 0;subRL->_bf = 0;subR->_bf = 1;}else if (bf == 1){// subRL的右子树新增parent->_bf = -1;subRL->_bf = 0;subR->_bf = 0;}else{assert(false);}}判断是否符合AVL树
主要运用递归的思想,不多阐述,实在不明白可以画递归展开图。
int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}bool _IsBalance(Node* root){if (root == nullptr)return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(rightHeight - leftHeight) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}三、整体代码
#pragma once
#include<iostream>
#include<assert.h>
using namespace std;template<class K, class V>
struct AVLTreeNode
{AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;pair<K, V> _kv;int _bf; // balance factorAVLTreeNode(const pair<K, V>& kv):_left(nullptr), _right(nullptr), _parent(nullptr), _kv(kv), _bf(0){}
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}while (parent){if (cur == parent->_left)//根据在左还是右改变bf值{parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0)//bf=0则向上都无需变化{break;}else if (parent->_bf == 1 || parent->_bf == -1)//bf变化向上遍历改变bf值{cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2)//破坏了bf值需要-1<=bf<=1的区间,需要旋转矫正{if (parent->_bf == 2 && cur->_bf == 1)//左旋情况{RotateL(parent);}else if (parent->_bf == -2 && cur->_bf == -1)//右旋情况{RotateR(parent);}else if (parent->_bf == 2 && cur->_bf == -1)//右旋再左旋情况{RotateRL(parent);}else if (parent->_bf == -2 && cur->_bf == 1)//左旋再右旋情况{RotateLR(parent);}// 1、旋转让这颗子树平衡了// 2、旋转降低了这颗子树的高度,恢复到跟插入前一样的高度,所以对上一层没有影响,不用继续更新break;}else{assert(false);//其它情况的bf值表示这颗avl树本身就有问题}}return true;}void InOrder(){_InOrder(_root);cout << endl;}bool IsBalance(){return _IsBalance(_root);}private:void RotateL(Node* parent)//左旋{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;subR->_left = parent;Node* parentParent = parent->_parent;parent->_parent = subR;if (subRL)//判断节点subRL是否为空,防止出错subRL->_parent = parent;if (_root == parent){_root = subR;subR->_parent = nullptr;}else{if (parentParent->_left == parent)//链接subR给父节点的父节点,需要判断是在左子树还是右子树{parentParent->_left = subR;}else{parentParent->_right = subR;}subR->_parent = parentParent;}parent->_bf = subR->_bf = 0;}void RotateR(Node* parent)//右旋{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;subL->_right = parent;Node* parentParent = parent->_parent;parent->_parent = subL;if (_root == parent){_root = subL;subL->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = subL;}else{parentParent->_right = subL;}subL->_parent = parentParent;}parent->_bf = subL->_bf = 0;}void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){// subRL自己就是新增parent->_bf = subR->_bf = subRL->_bf = 0;}else if (bf == -1){// subRL的左子树新增parent->_bf = 0;subRL->_bf = 0;subR->_bf = 1;}else if (bf == 1){// subRL的右子树新增parent->_bf = -1;subRL->_bf = 0;subR->_bf = 0;}else{assert(false);}}void RotateLR(Node* parent){//...Node* subL = parent->_left;Node* subLR = subL->_right;int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){// subLR自己就是新增parent->_bf = subL->_bf = subLR->_bf = 0;}else if (bf == -1){// subLR的左子树新增parent->_bf = 1;subL->_bf = 0;subLR->_bf = 0;}else if (bf == 1){// subLR的右子树新增subL->_bf = -1;parent->_bf = 0;subLR->_bf = 0;}else{assert(false);}}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}bool _IsBalance(Node* root){if (root == nullptr)return true;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);if (rightHeight - leftHeight != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}return abs(rightHeight - leftHeight) < 2&& _IsBalance(root->_left)&& _IsBalance(root->_right);}private:Node* _root = nullptr;
};感谢你耐心的看到这里ღ( ´・ᴗ・` )比心,如有哪里有错误请踢一脚作者o(╥﹏╥)o!

给个三连再走嘛~