1:和PLC虚拟连接【选项------PLC------外部连接------添加Advance】

2:PDPS插入cojt/jt文件,【建模-插入组件】【这样可以直接把机械端的设计文件导入】

3:定义机械设备的动作设计,比如气缸的打开/关闭动作【建模-运动学设备-姿态编辑器】

4:定义设备的动作逻辑流程【控件-编辑逻辑资源-逻辑行为编辑】在软件端定义硬件的控制,让硬件动起来有逻辑。
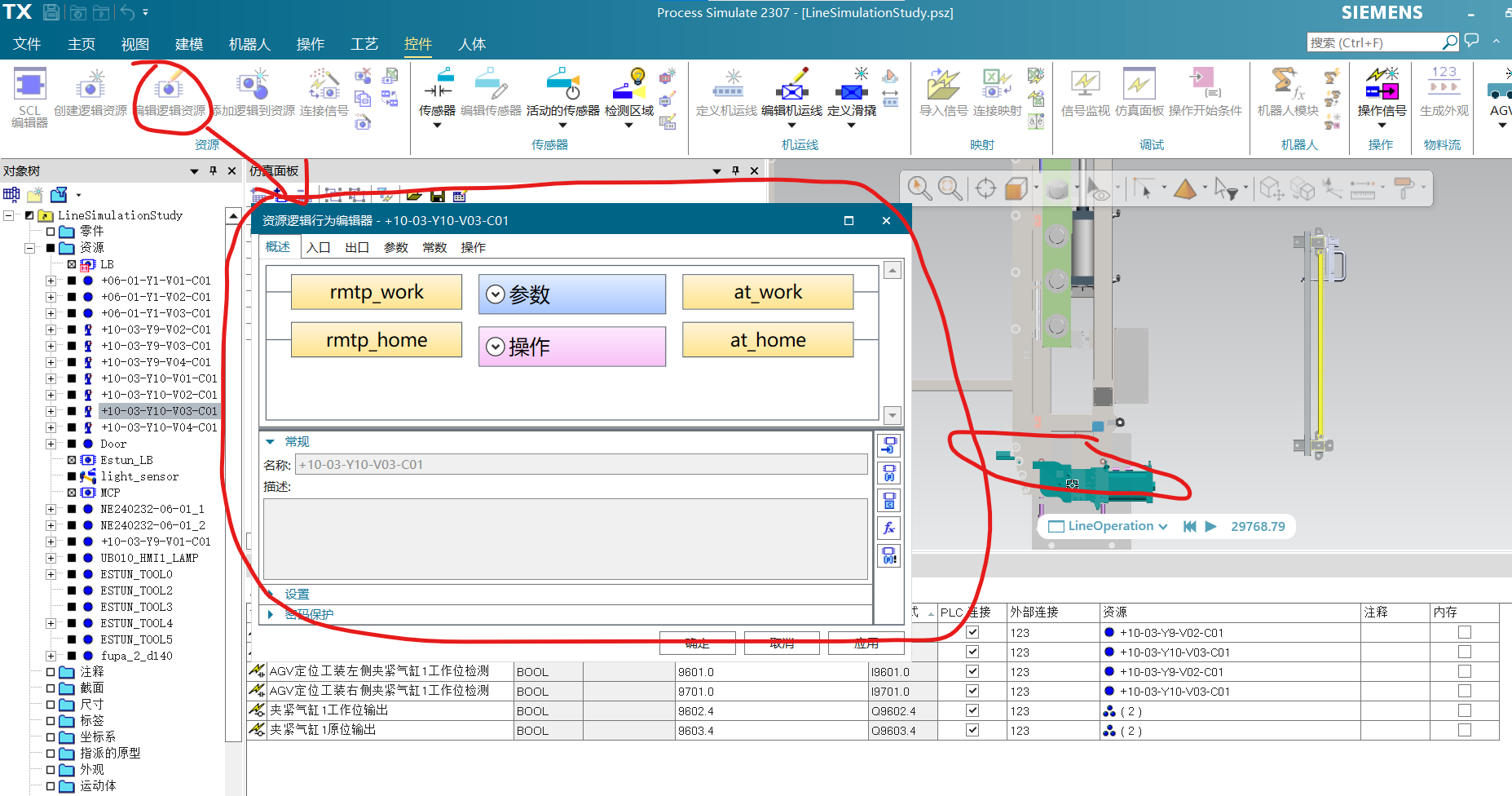
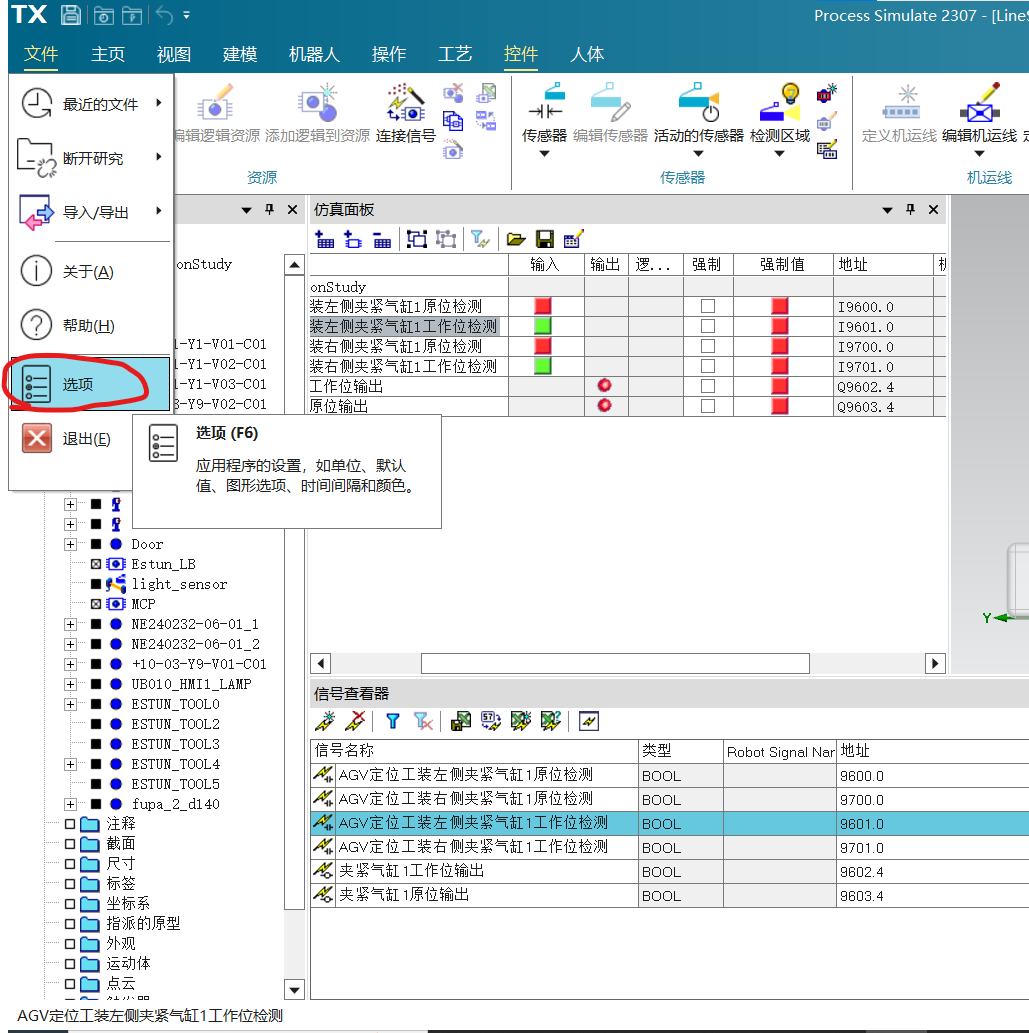
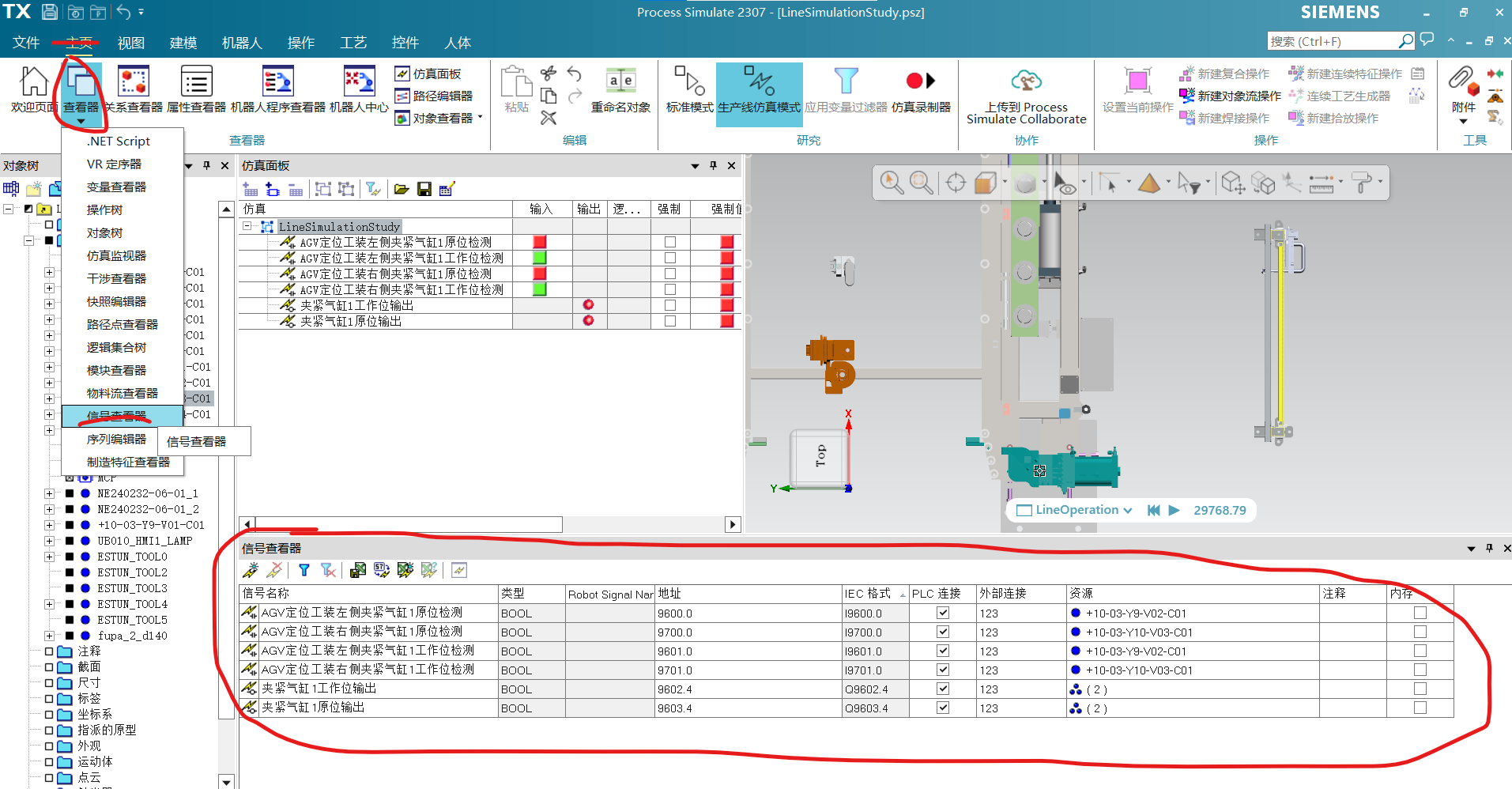
5:添加和PLC信号相关的信号点位【主页-查看器-信号查看器-添夹信号】
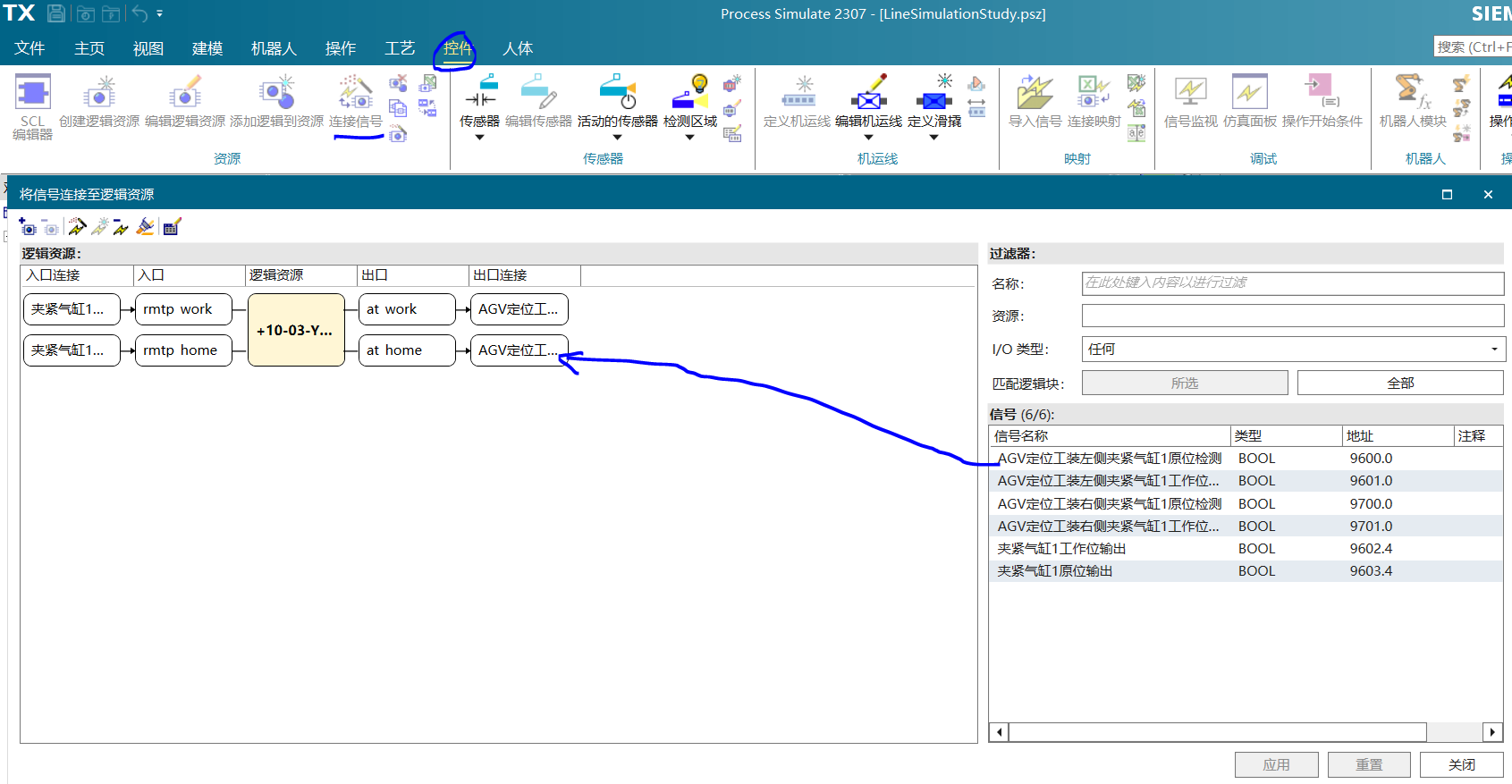
6:把添加的信号和硬件动作逻辑相关联【控件-连接信号-把信号拖入到相关的逻辑行为上】
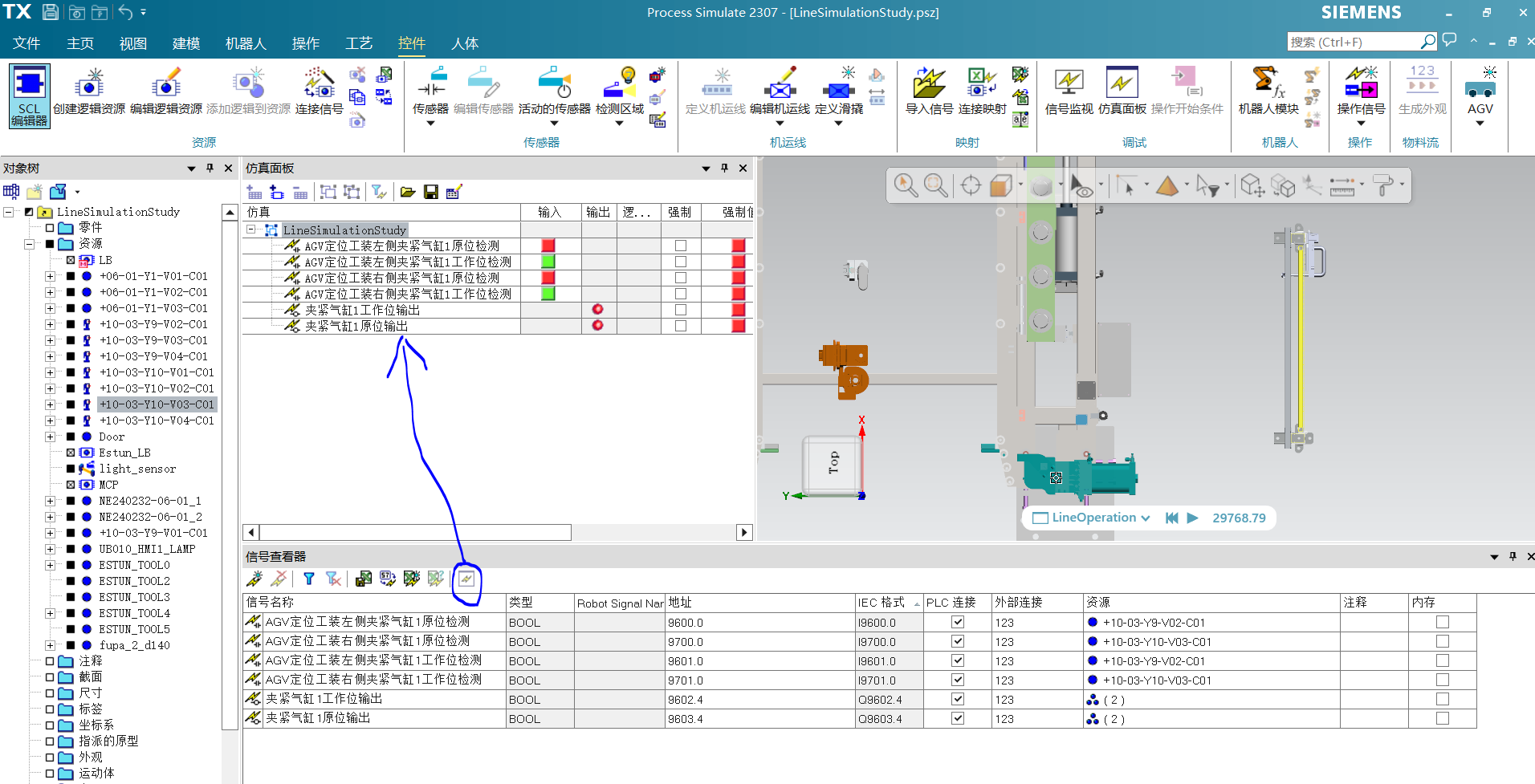
7:定义硬件初始位【信号编辑器-仿真面板】
8:进行仿真【点击仿真按钮】