在前几期的博文中我们讲了pytorch的DDP,但是当时的demo是自制的虚拟数据集(Pytorch分布式训练:DDP),这期文章我们使用Mnist数据集做测试,测试并完善代码。
快速开始
1. 我们修改一下main函数,在main函数中导入Mnist数据。我这里把测试集关闭了,需要的可以打开。
def main(rank, world_size, max_epochs, batch_size):ddp_setup(rank, world_size)train_dataset = datasets.MNIST(root="./MNIST", train=True, transform=data_tf, download=True)train_dataloader = DataLoader(train_dataset,batch_size=batch_size,shuffle=False,sampler=DistributedSampler(train_dataset))model = Net()# optimzer = torch.optim.Adam(model.parameters(), lr=1e-3)optimzer = torch.optim.SGD(model.parameters(), lr=1e-2)trainer = Trainer(model=model, gpu_id=rank, optimizer=optimzer, train_dataloader=train_dataloader)trainer.train(max_epochs)destroy_process_group()# test_dataset = datasets.MNIST(root="./MNIST", train=False, transform=data_tf, download=True)# test_dataloader = DataLoader(test_dataset,# batch_size=32,# shuffle=False)# evaluation(model=model, test_dataloader=test_dataloader)2. 修改模型结构,非常简单的一个网络
class Net(nn.Module):def __init__(self):super(Net, self).__init__()self.conv1 = nn.Conv2d(1, 32, kernel_size=3)self.conv2 = nn.Conv2d(32, 64, kernel_size=3)self.conv2_drop = nn.Dropout2d()self.fc1 = nn.Linear( 64*5*5, 500)self.fc2 = nn.Linear(500, 10)def forward(self, x):x = F.relu(F.max_pool2d(self.conv1(x), 2))x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2))# print(x.shape)x = x.view(-1, 64*5*5)x = F.relu(self.fc1(x))x = F.dropout(x, training=self.training)x = self.fc2(x)return x3. 完整代码如下,增加了计算准确率的功能,这些代码可以自己写个函数进行封装的,我太懒了。。。
"""
pytorch分布式训练结构
"""
from time import time
import os
import torch.nn as nn
import torch
import torch.nn.functional as F
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
# 多gpu训练所需的包
import torch.multiprocessing as mp
from torch.utils.data.distributed import DistributedSampler
from torch.nn.parallel import DistributedDataParallel as DDP
from torch.distributed import init_process_group, destroy_process_groupdef ddp_setup(rank, world_size):"""每个显卡都进行初始化"""os.environ["MASTER_ADDR"] = "localhost"os.environ["MASTER_PORT"] = "12355"# init_process_group(backend="nccl", rank=rank, world_size=world_size)init_process_group(backend="gloo", rank=rank, world_size=world_size)torch.cuda.set_device(rank)data_tf = transforms.Compose([transforms.ToTensor(),transforms.Normalize([0.5],[0.5])]
)class Net(nn.Module):def __init__(self):super(Net, self).__init__()self.conv1 = nn.Conv2d(1, 32, kernel_size=3)self.conv2 = nn.Conv2d(32, 64, kernel_size=3)self.conv2_drop = nn.Dropout2d()self.fc1 = nn.Linear( 64*5*5, 500)self.fc2 = nn.Linear(500, 10)def forward(self, x):x = F.relu(F.max_pool2d(self.conv1(x), 2))x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)), 2))# print(x.shape)x = x.view(-1, 64*5*5)x = F.relu(self.fc1(x))x = F.dropout(x, training=self.training)x = self.fc2(x)return xclass Trainer:def __init__(self, model, train_dataloader, optimizer, gpu_id):self.gpu_id = gpu_idself.model = model.to(gpu_id)self.train_dataloader = train_dataloaderself.optimizer = optimizerself.model = DDP(model, device_ids=[gpu_id])self.criterion = torch.nn.CrossEntropyLoss()def _run_batch(self, xs, ys):self.optimizer.zero_grad()output = self.model(xs)loss = self.criterion(output, ys)loss.backward()self.optimizer.step()_, predicted = torch.max(output, 1)return ys.size(0), (predicted == ys).sum()def _run_epoch(self, epoch):batch_size = len(next(iter(self.train_dataloader))[0])# print(f"|GPU:{self.gpu_id}| Epoch:{epoch} | batchsize:{batch_size} | steps:{len(self.train_dataloader)}")# 打乱数据,随机打乱self.train_dataloader.sampler.set_epoch(epoch)sample_nums = 0train_correct = 0for xs, ys in self.train_dataloader:xs = xs.to(self.gpu_id)ys = ys.to(self.gpu_id)sample_num, correct = self._run_batch(xs, ys)sample_nums += sample_numtrain_correct += correct# print(train_correct.item(), sample_nums)print(f"train_acc: {train_correct.item() / sample_nums * 100 :.3f}")def _save_checkpoint(self, epoch):ckp = self.model.module.state_dict()PATH = f"./params/checkpoint_{epoch}.pt"torch.save(ckp, PATH)def train(self, max_epoch: int):for epoch in range(max_epoch):self._run_epoch(epoch)# if self.gpu_id == 0:# self._save_checkpoint(epoch)def evaluation(model, test_dataloader):model.eval()model.to("cuda:0")sample_nums = 0train_correct = 0for xs, ys in test_dataloader:xs = xs.to("cuda:0")ys = ys.to("cuda:0")output = model(xs)_, predicted = torch.max(output, 1)sample_nums += ys.size(0)train_correct += (predicted == ys).sum()print(f"test_acc: {train_correct.item() / sample_nums * 100 :.3f}")def main(rank, world_size, max_epochs, batch_size):ddp_setup(rank, world_size)train_dataset = datasets.MNIST(root="./MNIST", train=True, transform=data_tf, download=True)train_dataloader = DataLoader(train_dataset,batch_size=batch_size,shuffle=False,sampler=DistributedSampler(train_dataset))model = Net()# optimzer = torch.optim.Adam(model.parameters(), lr=1e-3)optimzer = torch.optim.SGD(model.parameters(), lr=1e-2)trainer = Trainer(model=model, gpu_id=rank, optimizer=optimzer, train_dataloader=train_dataloader)trainer.train(max_epochs)destroy_process_group()# test_dataset = datasets.MNIST(root="./MNIST", train=False, transform=data_tf, download=True)# test_dataloader = DataLoader(test_dataset,# batch_size=32,# shuffle=False)# evaluation(model=model, test_dataloader=test_dataloader)if __name__ == "__main__":start_time = time()max_epochs = 50batch_size = 128world_size = torch.cuda.device_count()mp.spawn(main, args=(world_size, max_epochs, batch_size), nprocs=world_size)print(time() - start_time)
训练测试
我简单的测试了一下单卡和多卡的GPU性能(一张3090、一张3090ti),表格如下:

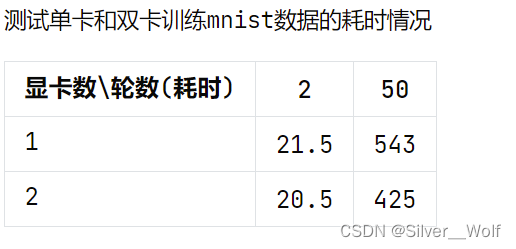
在数据量较小的前提下双卡对单卡优势不明显,加大epoch才能看出明显差距。
结尾
如果不出意外DDP的内容已经结束了,后续发现什么好玩的继续发出来
如果觉得文章对你有用请点赞、关注 ->> 你的点赞对我太有用了
群内交流更多技术
130856474 <-- 在这里