参考博客:
(1)FSM(有限状态机)
(2)关于有限状态机(FSM)的一些思考
(3)状态设计模式
1 状态机简介
有限状态机FSM:有限个状态以及在这些状态之间的转移和动作等行为的数学模型。
状态机思维:将一个事件分成多个完整的状态,每个状态通过输入和输出进入下一个状态。
优点:可以把模型的多状态和多状态之间的转换条件解耦,降低程序耦合度,让程序维护变的更加容易
FSM术语:state、transition、action、transition condition
2 FSM术语
2.1 状态 State
将一件事拆分为多件事,为每一件事赋予一个名字,这个名字就被称为FSM中的状态。因其状态有限,所以FSM被称为有限状态机。
- 风扇:划分为关、一档、二挡、三挡等状态
- 电梯门:划分为关闭、正在开启、开启、正在关闭
2.2 状态转移
状态转移:一个状态执行了某些动作转变为另一个状态的过程
2.3 转移条件 Event
在某个状态下,达到了某个转移条件,才会按照状态机的转移流程转移到下一状态,并执行相应的动作
2.4 动作 Action
当转变为一个新状态时,在这个状态下需要做的事情,称为动作
3 有限状态机的实现方式
| 实现方式 | 适用场景 | 优点 | 缺点 |
|---|---|---|---|
| 分支逻辑法 | 适用于条件简单,状态固定,没有新增和扩展的需求 | 状态机代码直译,简单直接,状态逻辑比较集中,容易查看 | 对于较复杂的状态机,这种方式容易遗漏或者写错。大量的if-else和switch-case代码分支判断逻辑,可读性和可扩展性比较差,对新增和修改的场景容易引入bug |
| 查表法 | 通过二维数组来表达状态机,适用于复杂状态机,执行动作比较固定和简单的场景,比如游戏这种状态比较多的场景就适合用查表法 | 相对于分支逻辑的实现方式,查表法的代码实现更加清晰,可读性和可维护性更好 | 遇到比较复杂的动作,就无法通过简单的二维数组表示了,有一定的局限性 |
| 状态模式 | 对于状态并不多、状态转移也比较简单,但事件触发执行的动作包含的业务逻辑可能比较复杂的状态机来说,我们首选这种实现方式 | 代码结构更清晰,可以规避过多的分支逻辑判断,代码可维护性更高 | 状态模式会引入很多状态类,如果状态颗粒度控制不好,会导致状态类爆炸问题;另外逻辑比较分散,集中在状态类中,无法在一个地方整体看出整个状态机的逻辑 |
3.1 示例FSM
三种状态:未支付、未收货、完成
两种事件:支付、收货
状态的流转即动作:支付后状态为未收货,收货后状态为完成
支付状态枚举
// 支付状态枚举
enum PayState {// 待支付UNPAY = 0,// 待收货UNRECEIVE = 1,// 完成FINAL = 2,// 错误ERROR = 3,
};
支付事件枚举
// 支付事件枚举
enum PayEvent {// 支付Pay = 0,// 收货RECEIVE = 1,
};
3.2 分支逻辑法
#include <iostream>using namespace std;// 支付状态枚举
enum PayState {// 待支付UNPAY = 0,// 待收货UNRECEIVE = 1,// 完成FINAL = 2,// 错误ERROR = 3,
};// 支付事件枚举
enum PayEvent {// 支付PAY = 0,// 收货RECEIVE = 1,
};class PayStateMachine {private:PayState payState;public:PayStateMachine() {payState = PayState::UNPAY;}void executeEvent(PayEvent payEvent) {switch (payEvent) {// 支付行为发生:未支付 -> 待收货case PAY:if (this->payState != PayState::UNPAY) {cout << "商铺不是【未支付】状态,请核验" << endl;this->payState = PayState::ERROR;break;} this->payState = PayState::UNRECEIVE;break;// 收货行为发生:待收货 -> 完成case RECEIVE:if (this->payState != PayState::UNRECEIVE) {cout << "商铺不是【未收货】状态,请核验" << endl;this->payState = PayState::ERROR;break;}this->payState = PayState::FINAL;break;default:cout << "未设置的行为" << endl;break;}}PayState getCurrentState() {return this->payState;}
};int main() {PayStateMachine payStateMachine;cout << "当前状态为:" << payStateMachine.getCurrentState() << endl;payStateMachine.executeEvent(PayEvent::RECEIVE);cout << "当前状态为:" << payStateMachine.getCurrentState() << endl;return 0;
}
运行结果:
当前状态为:0
商铺不是【未收货】状态,请核验
当前状态为:3
3.3 查表法
将状态和事件形成一个二维矩阵表,将结果态放入其中
| UNPAY | UNRECEIVE | FINAL | |
|---|---|---|---|
| PAY | 状态转为UNRECEIVE | ERROR | ERROR |
| RECEIVE | ERROR | 状态转为FINAL | ERROR |
将结果态转为一个二维数组进行存储,用的时候使用状态和事件枚举的value值作为索引,获取结果态
#include <iostream>
#include <vector>
using namespace std;// 支付状态枚举
enum PayState {// 待支付UNPAY = 0,// 待收货UNRECEIVE = 1,// 完成FINAL = 2,// 错误ERROR = 3,
};// 支付事件枚举
enum PayEvent {// 支付PAY = 0,// 收货RECEIVE = 1,
};class PayStateMachine {public:// 初始化PayStateMachine() {currentPayState = PayState::UNPAY;}// 使用状态和事件枚举的value值作为索引,获取结果态void executeEvent(PayEvent payEvent) {this->currentPayState = payStateTable[this->currentPayState][payEvent];}// 获取当前状态PayState getCurrentState() {return this->currentPayState; }private:// 当前状态PayState currentPayState;// 将结果态转为一个二维数组进行存储vector<vector<PayState>> payStateTable = {{UNRECEIVE, ERROR, ERROR},{ERROR, FINAL, ERROR}};
};int main()
{PayStateMachine payStateMachine;cout << "当前状态为:" << payStateMachine.getCurrentState() << endl;payStateMachine.executeEvent(PayEvent::PAY);cout << "当前状态为:" << payStateMachine.getCurrentState() << endl;payStateMachine.executeEvent(PayEvent::RECEIVE);cout << "当前状态为:" << payStateMachine.getCurrentState() << endl;return 0;
}
运行结果:
当前状态为:0
当前状态为:1
当前状态为:2
3.4 状态模式
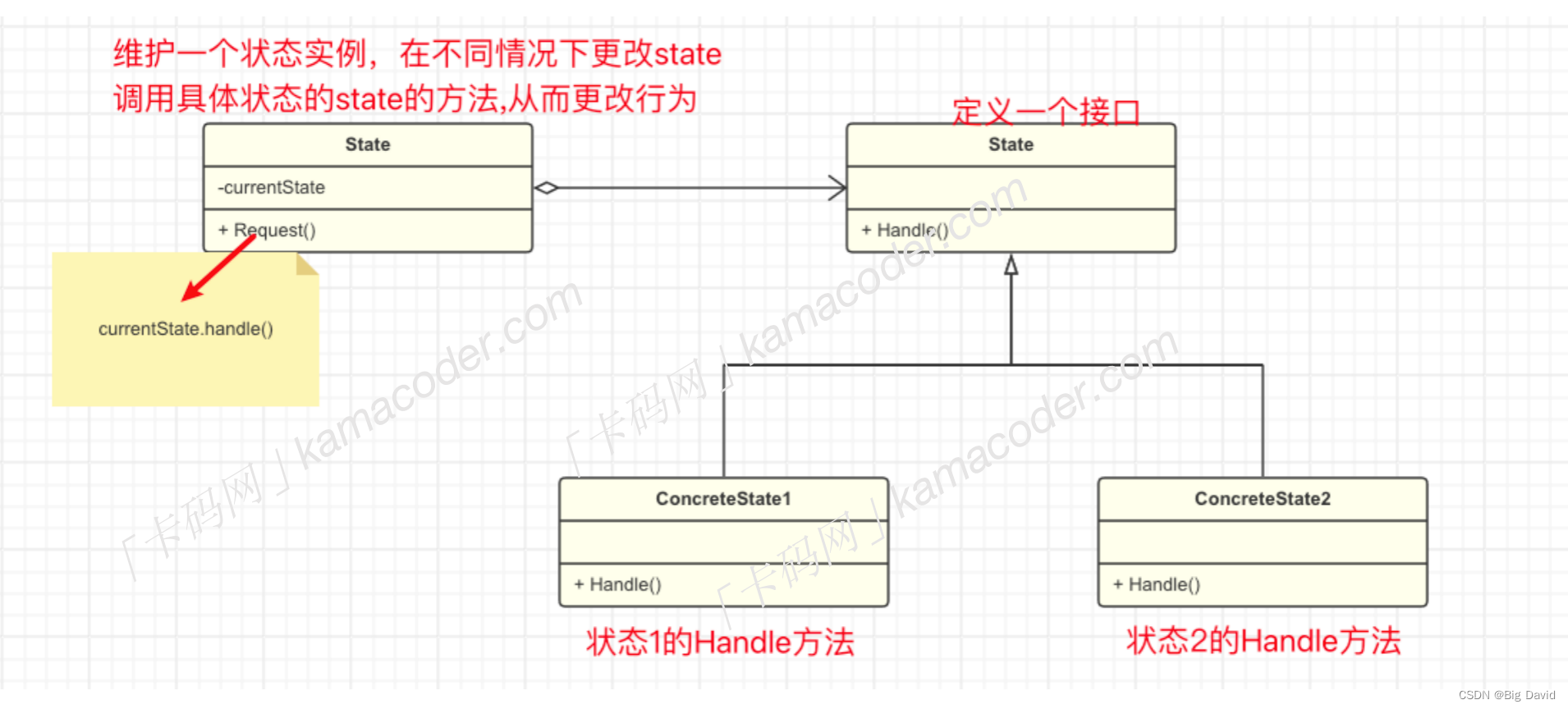
状态模式,定义状态接口,并将行为规定为抽象方法,实现对应三种状态以及行为方法(实现状态流转逻辑)。
定义状态机,并依赖状态接口。
同时,每个具体的状态又依赖状态机。
即状态机和各个状态类之间是双向依赖关系,因为每个状态需要依靠状态机修改状态
状态模式将每个状态的实现都封装在一个类中,每个状态类的实现相对独立,使得添加新状态或修改现有状态变得更加容易,避免了使用大量的条件语句来控制对象的行为。但是如果状态过多,会导致类的数量增加,可能会使得代码结构复杂。
状态模式基本结构
State:定义一个接口,用于封装与Context的一个特定状态相关的行为ConcreteState(具体状态): 负责处理Context在状态改变时的行为, 每一个具体状态子类实现一个与Context的一个状态相关的行为。Context(上下文): 维护一个具体状态子类的实例,这个实例定义当前的状态
#include <iostream>
#include <vector>
#include <string>// 状态接口
class State {
public:virtual std::string handle() = 0; // 处理状态的方法
};// 具体状态类
class OnState : public State {
public:std::string handle() override {return "Light is ON";}
};class OffState : public State {
public:std::string handle() override {return "Light is OFF";}
};class BlinkState : public State {
public:std::string handle() override {return "Light is Blinking";}
};
// 上下文类
class Light {
private:State* state; // 当前状态
public:Light() : state(new OffState()) {} // 初始状态为关闭void setState(State* newState) { // 设置新的状态delete state; // 释放之前的状态对象state = newState;}std::string performOperation() { // 执行当前状态的操作return state->handle();}~Light() {delete state; // 释放内存}
};int main() {// 读取要输入的命令数量int n;std::cin >> n;std::cin.ignore(); // 消耗掉整数后的换行符// 创建一个Light对象Light light;// 处理用户输入的每个命令for (int i = 0; i < n; i++) {// 读取命令并去掉首尾空白字符std::string command;std::getline(std::cin, command);// 根据命令执行相应的操作if (command == "ON") {light.setState(new OnState());} else if (command == "OFF") {light.setState(new OffState());} else if (command == "BLINK") {light.setState(new BlinkState());} else {// 处理无效命令std::cout << "Invalid command: " << command << std::endl;}// 在每个命令后显示灯的当前状态std::cout << light.performOperation() << std::endl;}return 0;
}
4 Autoware有限状态机代码解析
state_machine.h
#ifndef STATE_MACHINE_H
#define STATE_MACHINE_H#include <memory>
#include <iostream>namespace state_machine
{
// 定义一个枚举类StateList,表示车辆的不同状态
enum class StateList : int32_t
{MOVE_FORWARD, // 车辆向前移动TRAFFIC_LIGHT_STOP, // 遇到红灯停车LANE_CHANGE, // 车辆变更车道STOP_SIGN_STOP, // 遇到停车标志停车OBSTACLE_AVOIDANCE, // 避障MISSION_COMPLETE = 100, // 任务完成EMERGENCY = -1, // 紧急情况
};
// 定义一个枚举类TrafficLight,表示交通信号灯的状态
enum class TrafficLight : int32_t
{RED, // 红灯GREEN, // 绿灯UNKNOWN, // 未知
};
// 定义一个枚举类ChangeFlag,表示车辆变更车道的方向
enum class ChangeFlag : int32_t
{straight, // 直行right, // 向右变更车道left, // 向左变更车道unknown = -1, // 未知方向
};
// 用于将枚举类类型转换为整数类型
// 可以将枚举类的实例转换为整数类型,便于进行数值计算或其他整数相关的操作
template <class T>
typename std::underlying_type<T>::type enumToInteger(T t)
{return static_cast<typename std::underlying_type<T>::type>(t);
}// Forward Decralation
class StateContext;// abstract class for states
class BaseState
{
public:virtual ~BaseState() = default; // 确保子类可以正确地删除基类对象virtual void update(StateContext *context) = 0; // 用于更新状态virtual int32_t getStateName() // 返回当前状态的名称{return 0;};virtual std::unique_ptr<std::string> getStateNameString() // 返回当前状态的名称字符串{return 0;};
};// State : MOVE_FORWARD
class StateMoveForward : public BaseState
{
public:// 更新状态逻辑void update(StateContext *context) override;// 获取状态名称(整数表示)int32_t getStateName() override{return enumToInteger(StateList::MOVE_FORWARD);}// 获取状态名称(字符串表示)std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("MOVE_FORWARD"));}// 静态方法,用于创建 StateMoveForward 对象static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateMoveForward);};private:StateMoveForward() = default;
};// State : TRAFFIC_LIGHT_STOP
class StateTrafficLightStop : public BaseState
{
public:// 更新状态逻辑void update(StateContext *context) override;// 获取状态名称(整数表示)int32_t getStateName() override{return enumToInteger(StateList::TRAFFIC_LIGHT_STOP);}// 获取状态名称(字符串表示)std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("TRAFFIC_LIGHT_STOP"));}// 静态方法,用于创建 StateTrafficLightStop 对象static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateTrafficLightStop);};private:StateTrafficLightStop() = default;
};// State : LANE_CHANGE
class StateLaneChange : public BaseState
{
public:// 更新状态逻辑void update(StateContext *context) override;// 获取状态名称(整数表示)int32_t getStateName() override{return enumToInteger(StateList::LANE_CHANGE);}// 获取状态名称(字符串表示)std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("LANE_CHANGE"));}// 静态方法,用于创建 StateLaneChange 对象static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateLaneChange);};private:StateLaneChange() = default;
};// State : STOP_SIGN_STOP
class StateStopSignStop : public BaseState
{public:// 更新状态逻辑void update(StateContext *context) override;// 获取状态名称(整数表示)int32_t getStateName() override{return enumToInteger(StateList::STOP_SIGN_STOP);}// 获取状态名称(字符串表示)std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("STOP_SIGN_STOP"));}// 静态方法,用于创建StateStopSignStop对象static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateStopSignStop);};private:StateStopSignStop() = default;
};// State : Obstacle Avoidance
class StateObstacleAvoidance : public BaseState
{public:void update(StateContext *context) override;int32_t getStateName() override{return enumToInteger(StateList::STOP_SIGN_STOP);}std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("OBSTACLE_AVOIDANCE"));}static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateObstacleAvoidance);};private:StateObstacleAvoidance() = default;
};// State : EMERGENCY
class StateEmergency : public BaseState
{
public:void update(StateContext *context) override;int32_t getStateName() override{return enumToInteger(StateList::EMERGENCY);}std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("EMERGENCY"));}static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateEmergency);};private:StateEmergency() = default;
};// State : MISSION_COMPLETE
class StateMissionComplete : public BaseState
{
public:void update(StateContext *context) override;int32_t getStateName() override{return enumToInteger(StateList::MISSION_COMPLETE);}std::unique_ptr<std::string> getStateNameString() override{return std::unique_ptr<std::string>(new std::string("MISSION_COMPLETE"));}static std::unique_ptr<BaseState> create(){return std::unique_ptr<BaseState>(new StateMissionComplete);};private:StateMissionComplete() = default;
};
// 包含状态机当前状态的上下文对象,它包含了当前状态、交通灯颜色和车辆变更车道等信息
class StateContext
{
public:StateContext(): state_(StateMoveForward::create()), light_color_(TrafficLight::UNKNOWN), change_flag_(ChangeFlag::unknown){};// 设置状态机当前状态void setState(std::unique_ptr<BaseState> newState){state_ = std::move(newState);};// 更新状态机状态void update(){state_->update(this);}// 设置交通灯颜色void setLightColor(const int32_t &msg){light_color_ = static_cast<TrafficLight>(msg);}// 设置变道方向void setChangeFlag(const int32_t &msg){change_flag_ = static_cast<ChangeFlag>(msg);}// 获取当前交通灯颜色TrafficLight getLightColor() const{return light_color_;}// 获取当前变道方向ChangeFlag getChangeFlag() const{return change_flag_;}// 获取当前状态机的整数表示状态名称int32_t getCurrentState() const{return state_->getStateName();}// 获取当前状态机的字符串表示状态名称std::unique_ptr<std::string> getCurrentStateString() const{return state_->getStateNameString();}private:std::unique_ptr<BaseState> state_;TrafficLight light_color_;ChangeFlag change_flag_;
};} // state_machine
#endif // STATE_MACHINE_H
state_machine.cpp
#include "state_machine.h"namespace state_machine
{
void StateTrafficLightStop::update(StateContext *context)
{// 如果交通灯颜色为绿色,表示可以继续行驶,将状态机转移到StateMoveForward状态if (context->getLightColor() == TrafficLight::GREEN)context->setState(StateMoveForward::create());
}void StateMoveForward::update(StateContext *context)
{// 如果交通灯颜色为红色,表示需要停车,将状态机转移到 StateTrafficLightStop 状态if (context->getLightColor() == TrafficLight::RED)context->setState(StateTrafficLightStop::create());// 如果变化标志为右转或左转,将状态机转移到 StateLaneChange 状态if(context->getChangeFlag() == ChangeFlag::right || context->getChangeFlag() == ChangeFlag::left)context->setState(StateLaneChange::create());
}void StateLaneChange::update(StateContext *context)
{// 如果变化标志为直行,将状态机转移到 StateMoveForward 状态if(context->getChangeFlag() == ChangeFlag::straight)context->setState(StateMoveForward::create());
}void StateStopSignStop::update(StateContext *context)
{// stop sign stop
}void StateMissionComplete::update(StateContext *context)
{// Mission complete
}void StateEmergency::update(StateContext *context)
{// Emergency
}void StateObstacleAvoidance::update(StateContext *context)
{// Obstacle Avoidance
}} // state_machine
有限状态机原理及三种模式代码实现如上,错误之处望读者指正。