1.课题概述
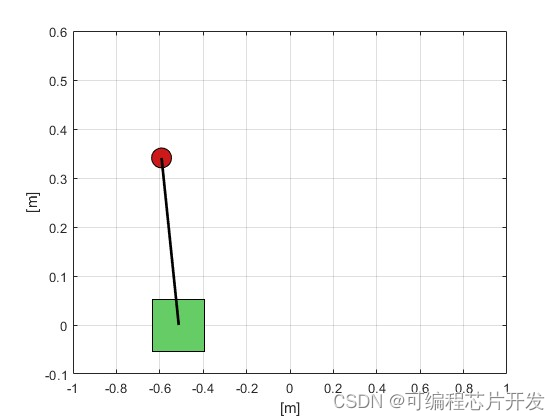
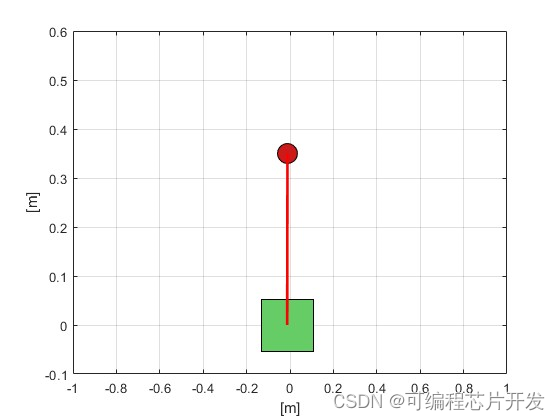
基于模糊控制算法的倒立摆控制系统,模糊规则,模糊控制器等通过MATLAB编程实现,通过模糊控制器对小车倒立摆平衡系统进行控制,输出倒立摆从不稳定到稳定的动画过程,最后输出小车,倒立摆的收敛过程。
2.系统仿真结果
3.核心程序与模型
版本:MATLAB2022a
for ij=Ts:Ts:Tend% 计算小车位置误差 ex = xp - X(1); % 计算小车位置误差变化量dex = Xt - X(1); % 计算摆角度误差 eq = qp - X(3); % 计算摆角度误差变化量 deq = Qt - X(3); % 模糊控制(u_x:小车位置,u_q:摆角度)tmp1 = func_check(ex/xn, dex/xdn);tmp2 = func_check(eq/qn, deq/qdn);Fr_tmp1 = func_fuzzy_rule(tmp1);Fr_tmp2 = func_fuzzy_rule(tmp2);Fr_dtmp1= func_defuzzy(Fr_tmp1);Fr_dtmp2= func_defuzzy(Fr_tmp2);u_x = Fr_dtmp1 * Un*1;u_q = Fr_dtmp2 * Un*2;Uset(ic,:) = [u_x, u_q];% 保存控制量 % 计算外力F F = -u_x + u_q;% 更新上一次的位置和角度 Xt = X(1);Qt = X(3);% 使用ode45求解摆的下一个状态 [T, X_next] = ode45(@func_pendulum, [0, Ts], X);% 更新当前状态X X = X_next(end,:)';% 保存当前状态到X_Fuzzy Xf(ic,:)= X';% 保存当前时间到time_Fuzzy Tf(ic) = ij;% 保存当前外力F到F_save Fset(ic)= F;% 更新计数器 ic = ic + 1;
endfigure
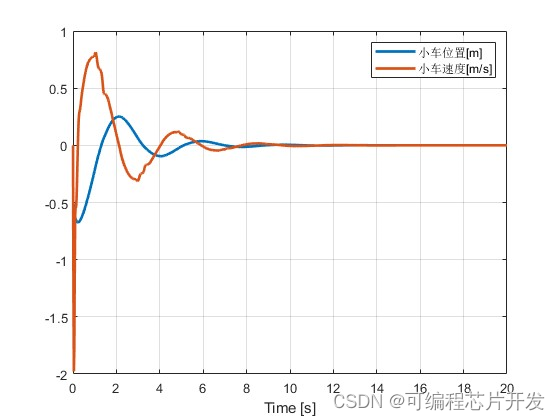
plot(Time_result, X_result(:,1:2),'linewidth',2)
grid on
xlabel('Time [s]')
legend('小车位置[m]','小车速度[m/s]')figure
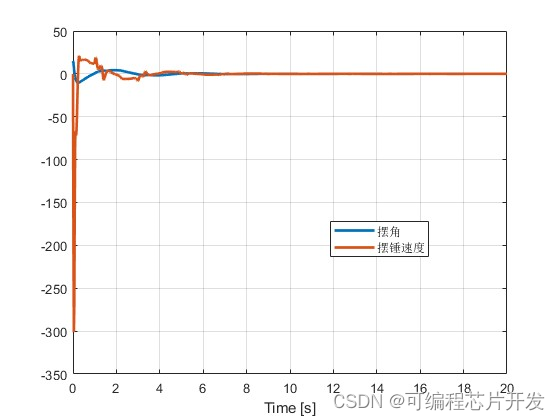
plot(Time_result, X_result(:,3:4)*180/pi,'linewidth',2)
grid on
xlabel('Time [s]')
legend('摆角', '摆锤速度')figure
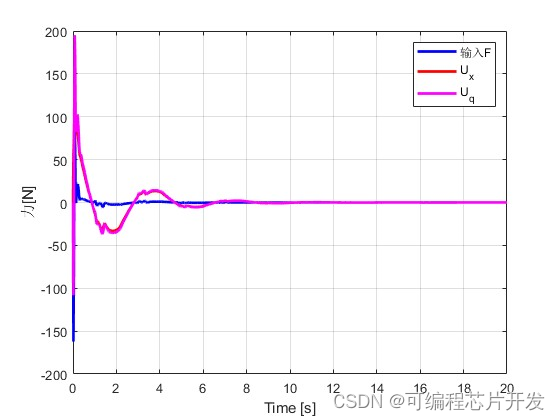
plot(Time_result, Fset,'b','linewidth',2)
hold on
plot(Time_result, Uset(:,1),'r','linewidth',2)
hold on
plot(Time_result, Uset(:,2),'m','linewidth',2)
grid on
xlabel('Time [s]')
ylabel('力[N]')
legend('输入F', 'U_x', 'U_q')
0006
4.系统原理简介
倒立摆是一个经典的控制问题,其目标是保持摆在垂直位置。由于其非线性、不稳定特性,传统控制方法往往难以实现理想效果。模糊控制作为一种先进的控制策略,能够处理不确定性和非线性问题,因此在倒立摆控制中具有显著优势。
4.1. 模糊控制算法原理
模糊控制是基于模糊集合理论、模糊语言变量及模糊逻辑推理的知识表示和推理方式。它模仿人的模糊思维方式和决策过程,不需要建立精确的数学模型。其核心组成包括:
模糊化:将输入量转化为模糊量,用隶属度函数表示。
μA(x)
其中,A 为模糊集合,x 为具体值,μA(x) 表示 x 对 A 的隶属度。
规则库:根据专家经验或数据,建立模糊规则,如“IF-THEN”规则。
模糊推理:基于规则库和当前模糊输入,进行推理得到模糊输出。
去模糊化:将模糊输出转化为精确量,常见的去模糊化方法有最大隶属度法、重心法等。
4.2. 倒立摆控制系统设计
对于倒立摆,我们定义其角度为 θ,角速度为 ω。控制目标是使得 θ 接近 0。设计模糊控制器如下:
输入:e=θ−θd e = θ - θ_de=θ−θd(角度误差)和 ec=ω−ωd ec = ω - ω_dec=ω−ωd(角速度误差)。
输出:u(控制力)。
模糊化:e 和 ec 的论域为 [-3, 3],u 的论域为 [-1, 1]。选择三角形或高斯型隶属度函数。
规则库:根据经验和试验,建立如下规则(仅举例):
如果 e 是负大且 ec 是负大,则 u 是正大。
如果 e 是零且 ec 是零,则 u 是零。
如果 e 是正大且 ec 是正大,则 u 是负大。




![[Paper Reading] Multiple View Geometry Transformers for 3D Human Pose Estimation](https://img2024.cnblogs.com/blog/1067530/202408/1067530-20240813212514727-1161268908.png)