目录
- 7.1 引子
- 7.2 比例控制
7.1 引子
\[7000 \frac{dx(t)}{dt}+10ax(t)=u(t)+d(t)
\]
\(u(t)\) 是体重变化,
\(u(t)=E_i-E_a\), \(E_i\) 是热 量摄入 ,\(E_a\) 是运动消耗,
\(x(t)\) 系统输出,体重
\(a\)是劳动强度系数
\(d(t)=-aC\) 是扰动量
进行拉普拉斯变换
\[7000(sX(s)-x_0)+10asX(s)=U(s)+D(s)
\]
\[→ (7000s+10a)X(s)=U(s)+D(s)+7000ax_0
\]
\(x_0\) 是初始体重,
传递函数
\[G(s)=\frac{X(s)}{U(s)+D(s)+7000x_0}=\frac{1}{7000s+10a}
\]

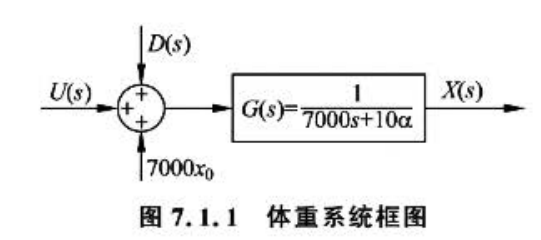
其中\(U(s)\) 和 \(D(s)\)是以 阶跃形式作用在系统上 ,
初 始状态\(7000x_0\),则是以 冲激方 式作用 在系统上。
\(G(s)\) 的特征方程为
\[7000s + 10a =0
\]
\[s_p= -\frac{a}{100}<0
\]
7.2 比例控制

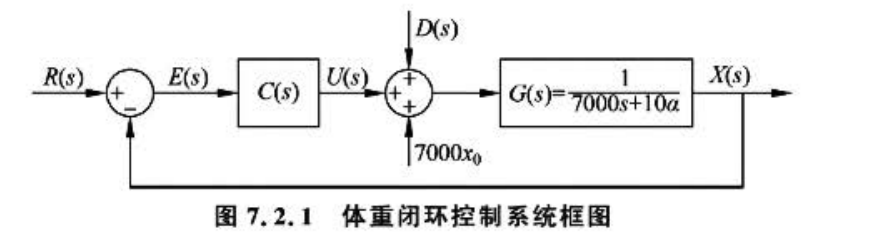
r(t)是目标体重(参考值),r(t)=r=65kg,对应的拉普拉斯变换\(R(s)=\frac{r}{s}\)
\(e(t)=r(t)-x(t)\)是误差(参考值与输出之家的差距),对应的拉普拉斯变换\(E(s)=R(s)-X(s)\)
\(C(s)\)是控制器,包含了我们需要设计的算法
人们在控制体重时会很自然地想到一种 策略-当体重大于目标值的时候, 那就多运动.
少吃饭 ,而且超重得越多 ,就越要多运动, 越要少吃饭, 反之亦然。 这 种简单粗暴的策略被
称为比例控制( Proportionz Controller) .
比例控制是一种简单的控制方式,其控制量为误差的线性函数:
\[u(t)=K_{P}e(t)
\]
\(K_{P}\) 为比例增益, $ e(t)$ 为误差。
在拉普拉斯变换域中,比例控制可以表示为:
\[U(s)=K_{P}E(s)
\]


![【刷题笔记】[BalticOI 2024] Portal](https://img2024.cnblogs.com/blog/3519026/202411/3519026-20241119171400121-1237881824.png)