在这个项目中,我们将学习如何使用卷积变分自动编码器 (CVAE) 来处理和重建 3D 湍流数据。
我们使用计算流体动力学 (CFD) 方法生成 3D 湍流立方体,每个 3D 立方体沿着三个速度分量携带物理信息(与图像数据类似,被视为单独的通道)。

推荐:用 NSDT设计器 快速搭建可编程3D场景。
作为 3D CFD 数据预处理的一部分,我们编写了一个自定义 pytorch 数据加载器,用于对数据集执行标准化和批处理操作。
CVAE 对预处理后的数据实施 3D 卷积 (3DConvs) 来执行重建。
通过微调超参数和操纵我们的模型架构,我们在 3D 重建方面取得了显着的进步。
可以在这个 Github 存储库中找到项目代码。
1、数据说明
我们的数据集是使用 CFD 模拟方法生成的,它包含从供暖通风和空调 (HVAC) 管道中提取的立方体。
每个立方体代表特定时间携带物理信息的湍流的三维时间快照。 从模拟中提取的信息基于两个流动分量:速度场 U 和静压 p。 U 场 (x, y, z) 和标量 p 基于流的方向(立方体的法线方向)。
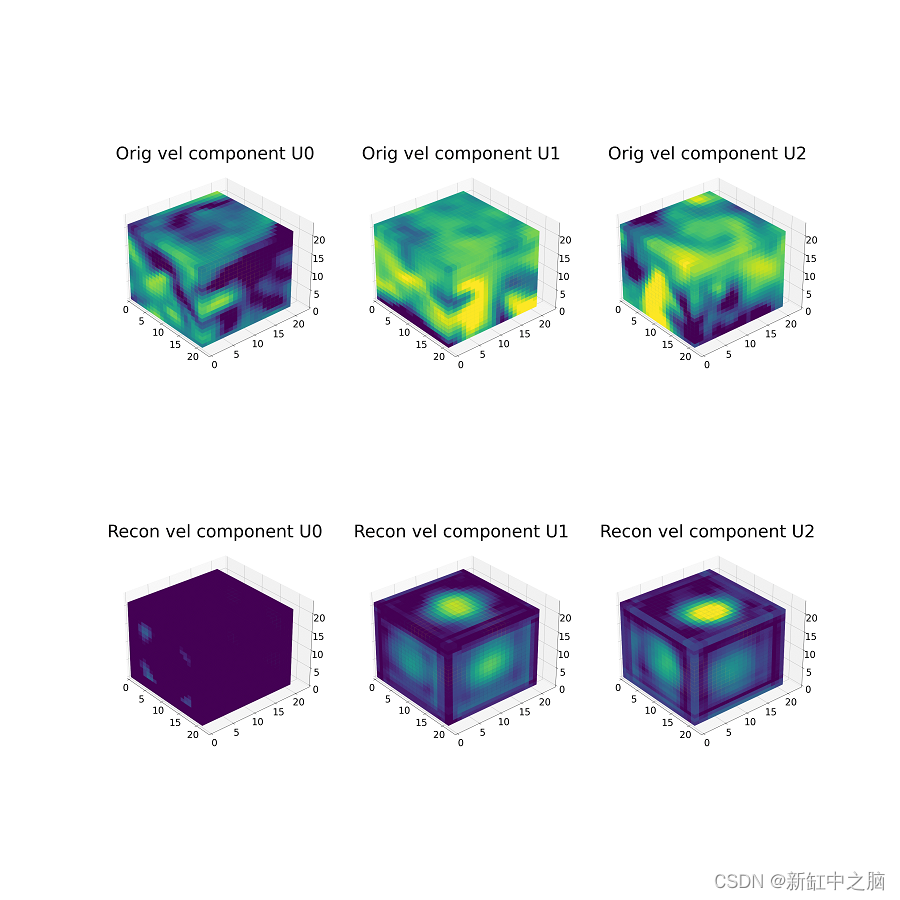
我们使用体素将 3D 立方体表示为尺寸为 21 × 21 × 21 x 100(x_coord、y_coord、z_coord、timestep)的数组。 下图显示了一个立方体数据样本,我们使用热图可视化每个速度分量。
总的来说,该数据集由 96 个模拟组成,每个模拟有 100 个时间步长,总共 9600 个立方体(对于每个速度分量)。

注意:由于保密限制,我们不会公开我们的数据,你可以使用脚本并将其改编为自己的 3D 数据。
2、数据预处理
下面的脚本显示了为预处理 3D 数据而编写的自定义 pytorch 数据加载器。 以下是一些亮点:
- 立方体速度通道的加载和串联
- 数据标准化
- 数据缩放
请参阅存储库中的 dataloader.py 脚本以了解完整的实现。
3、模型架构
下图显示了已实现的 CVAE 架构。 在本例中,为了清晰起见,显示了 2DConv,但实现的架构使用 3DConv。
CVAE 由编码器网络(上部)、变分层(mu 和 sigma)(中右部分)和解码器网络(底部)组成。
编码器对输入立方体执行下采样操作,解码器对它们进行上采样以恢复原始形状。 变分层尝试学习数据集的分布,该层稍后可用于生成。
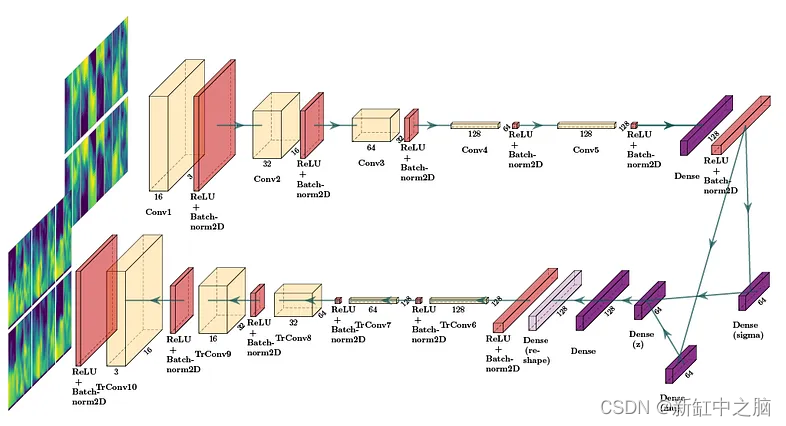
编码器网络由四个 3D 卷积层组成,每层的卷积滤波器数量是前一层的两倍(分别为 32、64、128 和 256),这使得模型能够学习更复杂的流特征。
密集层用于组合从最后一个编码器层获得的所有特征图,该层连接到计算后验流数据分布的参数(mu和sigma,这些参数使用重新定义概率分布)的变分层。 -[1]中描述的参数化技巧。这种概率分布允许我们从中采样,以生成尺寸为 8 × 8 x 8 的合成 3D 立方体。
解码器网络采用潜在向量并应用四个 3D 转置卷积层来恢复(重建)原始数据维度,每一层的卷积滤波器数量是前一层的一半(分别为 256、128、64 和 32)。
CVAE 使用两个损失函数进行训练:用于重建的均方误差 (MSE) 和用于潜在空间正则化的 Kullback-Leibler 散度 (KLB)。
我们将[2]中提出的架构和[3]中的超参数作为基线架构。
下面的脚本显示了 pytorch 中的一个示例,其中编码器和解码器都是使用 3D 卷积层 (Conv3d) 定义的:
self.encoder = nn.Sequential(nn.Conv3d(in_channels=image_channels, out_channels=16, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=16),nn.ReLU(),nn.Conv3d(in_channels=16, out_channels=32, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=32),nn.ReLU(),nn.Conv3d(in_channels=32, out_channels=64, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=64),nn.ReLU(),nn.Conv3d(in_channels=64, out_channels=128, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=128),nn.ReLU(),nn.Conv3d(in_channels=128, out_channels=128, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=128),nn.ReLU(),Flatten())self.decoder = nn.Sequential(UnFlatten(),nn.BatchNorm3d(num_features=128),nn.ReLU(),nn.ConvTranspose3d(in_channels=128, out_channels=128, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=128),nn.ReLU(),nn.ConvTranspose3d(in_channels=128, out_channels=64, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=64),nn.ReLU(),nn.ConvTranspose3d(in_channels=64, out_channels=32, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=32),nn.ReLU(),nn.ConvTranspose3d(in_channels=32, out_channels=16, kernel_size=4, stride=1, padding=0),nn.BatchNorm3d(num_features=16),nn.ReLU(),nn.ConvTranspose3d(in_channels=16, out_channels=image_channels, kernel_size=4, stride=1, padding=0), # dimensions should be as originalnn.BatchNorm3d(num_features=3))
4、设置环境
克隆此存储库:
git clone git@github.com:agrija9/Convolutional-VAE-for-3D-Turbulence-Data
建议使用虚拟环境来运行本项目:
- 可以安装Anaconda并在系统中创建环境
- 可以使用 pip venv 创建环境
在 pip/conda 环境中安装以下依赖项:
- NumPy (>= 1.19.2)
- Matplotlib (>= 3.3.2)
- PyTorch (>= 1.7.0)
- Torchvision (>= 0.8.1)
- scikit-learn (>= 0.23.2)
- tqdm
- tensorboardX
- torchsummary
- PIL
- collections
5、模型训练
要训练模型,请打开终端,激活 pip/conda 环境并输入:
cd /path-to-repo/Convolutional-VAE-for-3D-Turbulence-Data
python main.py --test_every_epochs 3 --batch_size 32 --epochs 40 --h_dim 128 --z_dim 64
以下是一些可以修改的超参数来训练模型
- –batch_size 每个补丁要处理的立方体数量
- –epochs 训练纪元数
- –h_dim 隐藏密集层的维度(连接到变分层)
- –z_dim 潜在空间维度
main.py 脚本调用模型并根据 3D CFD 数据对其进行训练。 使用 NVIDIA Tesla V100 GPU 训练 100 个 epoch 大约需要 2 小时。 在本例中,模型训练了 170 个 epoch。
请注意,在训练 3DConvs 模型时,与 2DConvs 模型相比,学习参数的数量呈指数级增长,因此,3D 数据的训练时间要长得多。
6、模型输出
训练完pytorch模型后,会生成一个包含训练后的权重的文件checkpoint.pkl。
在训练过程中,每隔 n 个时期根据测试数据对模型进行评估,脚本将重建的立方体与原始立方体进行比较,并将它们保存为图像。 此外,损失值被记录并放置在运行文件夹中,可以通过输入以下内容使用张量板可视化损失曲线:
cd /path-to-repo/Convolutional-VAE-for-3D-Turbulence-Data
tensorboard --logdir=runs/
如果没有创建,文件夹runs/会自动生成。
7、3D 重建结果
下图中,我们展示了同一立方体样本每 n 个 epoch 的重建结果。
顶行包含原始立方体样本(对于每个速度通道)。 底行包含每 n 个时期的重建输出。
对于这个例子,我们展示了从 0 到 355 个时期的重建,间隔为 15 个时期。 请注意作为历元函数的重建的改进。
原文链接:3D VAE神经网络实战 — BimAnt