Linux版本号4.1.15 芯片I.MX6ULL 大叔学Linux 品人间百味 思文短情长
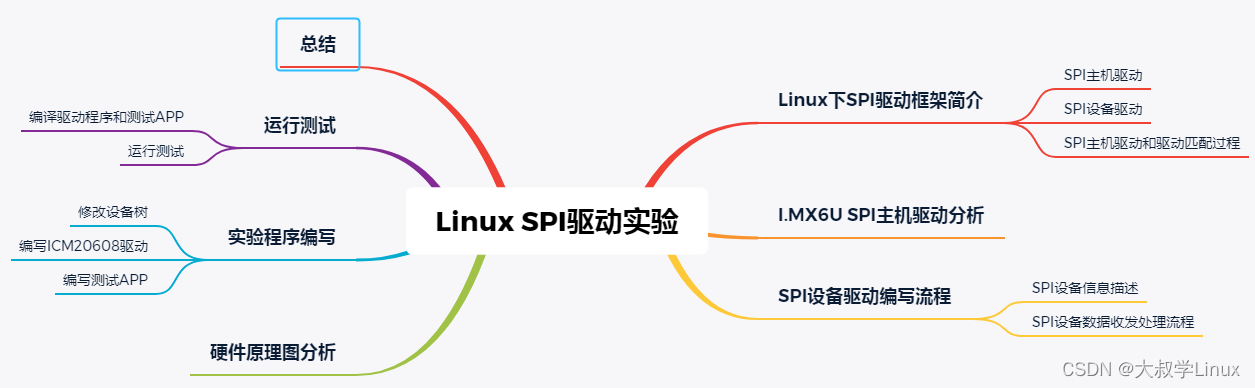
本章的思维导图如下:
二、I.MX6U SPI主机驱动分析
主机驱动一般都是由SOC厂商写好的。不作为重点需要掌握的内容。
三、SPI设备驱动编写流程
1、SPI设备信息描述
1)、IO 的 pinctrl 子节点创建与修改
根据所使用的 IO 来创建或修改 pinctrl 子节点,检查是否被占用。
2)、SPI 设备节点的创建与修改
308 &ecspi1 {
309 fsl,spi-num-chipselects = <1>;/*设置“ fsl,spi-num-chipselects”属性为 1,表示只有一个设备。*/
310 cs-gpios = <&gpio4 9 0>;/*设置“ cs-gpios”属性,也就是片选信号为 GPIO4_IO09。*/
311 pinctrl-names = "default";*设置“ pinctrl-names”属性,也就是 SPI 设备所使用的 IO 名字。*/
312 pinctrl-0 = <&pinctrl_ecspi1>;/*设置“ pinctrl-0”属性,也就是所使用的 IO 对应的 pinctrl 节点。*/
313 status = "okay";/*将 ecspi1 节点的“ status”属性改为“ okay”。*/
314
315 flash: m25p80@0 {/*ecspi1 下的 m25p80 设备信息,每一个 SPI 设备都采用一个子节点来描述
其设备信息。第 315 行的“ m25p80@0”后面的“ 0”表示 m25p80 的接到了 ECSPI 的通道 0
上。这个要根据自己的具体硬件来设置。*/
316 #address-cells = <1>;
317 #size-cells = <1>;
318 compatible = "st,m25p32";/*SPI 设备的 compatible 属性值,用于匹配设备驱动。*/
319 spi-max-frequency = <20000000>;/*“ spi-max-frequency”属性设置 SPI 控制器的最高频率,这个要根据所使用的
SPI 设备来设置,比如在这里将 SPI 控制器最高频率设置为 20MHz。*/
320 reg = <0>;/* reg 属性设置 m25p80 这个设备所使用的 ECSPI 通道*/
321 };
322 };上述代码是 I.MX6Q 的一款板子上的一个 SPI 设备节点,在这个板子的 ECSPI 接口上接了一个 m25p80,这是一个 SPI 接口的设备。
2、SPI设备数据收发处理流程
spi_transfer 结构体,此结构体用于描述 SPI 传输信息,结构体内容如下:
603 struct spi_transfer {
604 /* it's ok if tx_buf == rx_buf (right?)
605 * for MicroWire, one buffer must be null
606 * buffers must work with dma_*map_single() calls, unless
607 * spi_message.is_dma_mapped reports a pre-existing mapping
608 */
609 const void *tx_buf;/*tx_buf 保存着要发送的数据。*/
610 void *rx_buf;/*rx_buf 用于保存接收到的数据。*/
611 unsigned len;/*len 是要进行传输的数据长度, SPI 是全双工通信,因此在一次通信中发送和
接收的字节数都是一样的,所以 spi_transfer 中也就没有发送长度和接收长度之分。*/
612
613 dma_addr_t tx_dma;
614 dma_addr_t rx_dma;
615 struct sg_table tx_sg;
616 struct sg_table rx_sg;
617
618 unsigned cs_change:1;
619 unsigned tx_nbits:3;
620 unsigned rx_nbits:3;
621 #define SPI_NBITS_SINGLE 0x01 /* 1bit transfer */
622 #define SPI_NBITS_DUAL 0x02 /* 2bits transfer */
623 #define SPI_NBITS_QUAD 0x04 /* 4bits transfer */
624 u8 bits_per_word;
625 u16 delay_usecs;
626 u32 speed_hz;
627
628 struct list_head transfer_list;
629 };spi_message 也是一个结构体:
660 struct spi_message {
661 struct list_head transfers;
662
663 struct spi_device *spi;
664
665 unsigned is_dma_mapped:1;
......
678 /* completion is reported through a callback */
679 void (*complete)(void *context);
680 void *context;
681 unsigned frame_length;
682 unsigned actual_length;
683 int status;
684
685 /* for optional use by whatever driver currently owns the
686 * spi_message ... between calls to spi_async and then later
687 * complete(), that's the spi_master controller driver.
688 */
689 struct list_head queue;
690 void *state;
691 };spi_message初始化函数为 spi_message_init,函数原型如下:
void spi_message_init(struct spi_message *m) spi_message 初始化完成以后需要将 spi_transfer 添加到 spi_message 队列中,这里要用
到 spi_message_add_tail 函数,此函数原型如下:
void spi_message_add_tail(struct spi_transfer *t, struct spi_message *m)t: 要添加到队列中的 spi_transfer。
m: spi_transfer 要加入的 spi_message。
spi_message 准备好以后既可以进行数据传输了,数据传输分为同步传输和异步传输,同步
传输会阻塞的等待 SPI 数据传输完成,同步传输函数为 spi_sync,函数原型如下:
int spi_sync(struct spi_device *spi, struct spi_message *message)spi: 要进行数据传输的 spi_device。
message:要传输的 spi_message。
返回值: 无。
异步传输不会阻塞的等到 SPI 数据传输完成,异步传输需要设置 spi_message 中的 complete成员变量, complete 是一个回调函数,当 SPI 异步传输完成以后此函数就会被调用。 SPI 异步传输函数为 spi_async,函数原型如下:
int spi_async(struct spi_device *spi, struct spi_message *message)spi: 要进行数据传输的 spi_device。
message:要传输的 spi_message。
返回值: 无。
本次测试,采用同步传输方式来完成 SPI 数据的传输工作,也就是 spi_sync 函数。
SPI 数据传输步骤如下:
①、申请并初始化 spi_transfer,设置 spi_transfer 的 tx_buf 成员变量, tx_buf 为要发送的数
据。然后设置 rx_buf 成员变量, rx_buf 保存着接收到的数据。最后设置 len 成员变量,也就是
要进行数据通信的长度。
②、使用 spi_message_init 函数初始化 spi_message。
③、使用 spi_message_add_tail函数将前面设置好的 spi_transfer添加到 spi_message队列中。
④、使用 spi_sync 函数完成 SPI 数据同步传输。
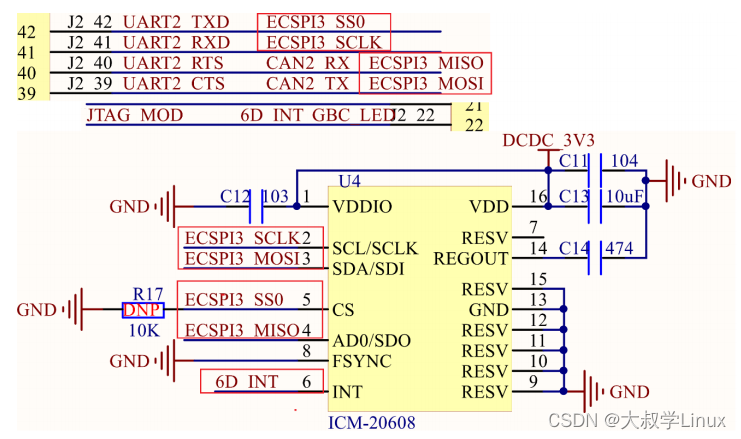
四、硬件原理图分析
五、实验程序编写
1、修改设备树
1)、添加 ICM20608 所使用的 IO
1 pinctrl_ecspi3: icm20608 {
2 fsl,pins = <
3 MX6UL_PAD_UART2_TX_DATA__GPIO1_IO20 0x10b0 /* CS */
4 MX6UL_PAD_UART2_RX_DATA__ECSPI3_SCLK 0x10b1 /* SCLK */
5 MX6UL_PAD_UART2_RTS_B__ECSPI3_MISO 0x10b1 /* MISO */
6 MX6UL_PAD_UART2_CTS_B__ECSPI3_MOSI 0x10b1 /* MOSI */
7 >;
8 };2)、在 ecspi3 节点追加 icm20608 子节点
1 &ecspi3 {
2 fsl,spi-num-chipselects = <1>;/*当前片选数量为 1*/
3 cs-gpio = <&gpio1 20 GPIO_ACTIVE_LOW>; /* cant't use cs-gpios! *//*用了一个自己定义的“ cs-gpio”属
性*/
4 pinctrl-names = "default";
5 pinctrl-0 = <&pinctrl_ecspi3>;/*设置 IO 要使用的 pinctrl 子节点*/
6 status = "okay";/* imx6ull.dtsi 文件中默认将 ecspi3 节点状态(status)设置为“ disable”,这里我们要将
其改为“ okay”。*/
7
8 spidev: icm20608@0 {/*icm20608 设备子节点,因为 icm20608 连接在 ECSPI3 的第 0 个通道上,因此
@后面为 0。第 9 行设置节点属性兼容值为“ alientek,icm20608”,第 10 行设置 SPI 最大时钟频
率为 8MHz,这是 ICM20608 的 SPI 接口所能支持的最大的时钟频率。第 11 行, icm20608 连接
在通道 0 上,因此 reg 为 0。*/
9 compatible = "alientek,icm20608";
10 spi-max-frequency = <8000000>;
11 reg = <0>;
12 };
13 };2、编写ICM20608驱动
1)、icm20608 设备结构体创建
需要注意在 probe 函数中设置 private_data 为 probe 函数传递进来的 spi_device 参数。
void *private_data; /* 私有数据 */2)、icm20608 的 spi_driver 注册与注销
1 /* 传统匹配方式 ID 列表 */
2 static const struct spi_device_id icm20608_id[] = {/*第 2~5 行,传统的设备和驱动匹配表。*/
3 {"alientek,icm20608", 0},
4 {}
5 };
6
7 /* 设备树匹配列表 */
8 static const struct of_device_id icm20608_of_match[] = {/*第 8~11 行,设备树的设备与驱动匹配表,这里只有一个匹配项:“ alientek,icm20608”。*/
9 { .compatible = "alientek,icm20608" },
10 { /* Sentinel */ }
11 };
12
13 /* SPI 驱动结构体 */
14 static struct spi_driver icm20608_driver = {/*第 14~23 行, icm20608 的 spi_driver 结构体变量,当 icm20608 设备和此驱动匹配成功以后
第 15 行的 icm20608_probe 函数就会执行。同样的,当注销此驱动的时候 icm20608_remove 函
数会执行。*/
15 .probe = icm20608_probe,
16 .remove = icm20608_remove,
17 .driver = {
18 .owner = THIS_MODULE,
19 .name = "icm20608",
20 .of_match_table = icm20608_of_match,
21 },
22 .id_table = icm20608_id,
23 };
24
25 /*
26 * @description : 驱动入口函数
27 * @param : 无
28 * @return : 无
29 */
30 static int __init icm20608_init(void)/*第 30~33 行, icm20608_init 函数为 icm20608 的驱动入口函数,在此函数中使用
spi_register_driver 向 Linux 系统注册上面定义的 icm20608_driver。*/
31 {
32 return spi_register_driver(&icm20608_driver);
33 }
34
35 /*
36 * @description : 驱动出口函数
37 * @param : 无
38 * @return : 无
39 */
40 static void __exit icm20608_exit(void)/*第 40~43 行, icm20608_exit 函数为 icm20608 的驱动出口函数,在此函数中使用
spi_unregister_driver 注销掉前面注册的 icm20608_driver。*/
41 {
42 spi_unregister_driver(&icm20608_driver);
43 }
44
45 module_init(icm20608_init);
46 module_exit(icm20608_exit);
47 MODULE_LICENSE("GPL");
48 MODULE_AUTHOR("zuozhongkai");3)、probe&remove 函数
8 static int icm20608_probe(struct spi_device *spi)
9 {
10 int ret = 0;
11
12 /* 1、构建设备号 */
13 if (icm20608dev.major) {
14 icm20608dev.devid = MKDEV(icm20608dev.major, 0);
15 register_chrdev_region(icm20608dev.devid, ICM20608_CNT,
ICM20608_NAME);
16 } else {
17 alloc_chrdev_region(&icm20608dev.devid, 0, ICM20608_CNT,
ICM20608_NAME);
18 icm20608dev.major = MAJOR(icm20608dev.devid);
19 }
20
21 /* 2、注册设备 */
22 cdev_init(&icm20608dev.cdev, &icm20608_ops);
23 cdev_add(&icm20608dev.cdev, icm20608dev.devid, ICM20608_CNT);
24
25 /* 3、创建类 */
26 icm20608dev.class = class_create(THIS_MODULE, ICM20608_NAME);
27 if (IS_ERR(icm20608dev.class)) {
28 return PTR_ERR(icm20608dev.class);
29 }
30
31 /* 4、创建设备 */
32 icm20608dev.device = device_create(icm20608dev.class, NULL,
icm20608dev.devid, NULL, ICM20608_NAME);
33 if (IS_ERR(icm20608dev.device)) {
34 return PTR_ERR(icm20608dev.device);
35 }
36
37 /* 获取设备树中 cs 片选信号 */
38 icm20608dev.nd = of_find_node_by_path("/soc/aips-bus@02000000/
spba-bus@02000000/ecspi@02010000");
39 if(icm20608dev.nd == NULL) {
40 printk("ecspi3 node not find!\r\n");
41 return -EINVAL;
42 }
43
44 /* 2、 获取设备树中的 gpio 属性,得到 CS 片选所使用的 GPIO 编号 */
45 icm20608dev.cs_gpio = of_get_named_gpio(icm20608dev.nd,
"cs-gpio", 0);
46 if(icm20608dev.cs_gpio < 0) {
47 printk("can't get cs-gpio");
48 return -EINVAL;
49 }
50
51 /* 3、设置 GPIO1_IO20 为输出,并且输出高电平 */
52 ret = gpio_direction_output(icm20608dev.cs_gpio, 1);
53 if(ret < 0) {
54 printk("can't set gpio!\r\n");
55 }
56
57 /*初始化 spi_device */
58 spi->mode = SPI_MODE_0; /*MODE0, CPOL=0, CPHA=0 */
59 spi_setup(spi);
60 icm20608dev.private_data = spi; /* 设置私有数据 */
61
62 /* 初始化 ICM20608 内部寄存器 */
63 icm20608_reginit();
64 return 0;
65 } probe 函数,当设备与驱动匹配成功以后此函数就会执行,第 13~55 行都是标
准的注册字符设备驱动。其中在第 38~49 行获取设备节点中的“ cs-gpio”属性,也就是获取到
设备的片选 IO。
57 /*初始化 spi_device */
58 spi->mode = SPI_MODE_0; /*MODE0, CPOL=0, CPHA=0 *//*设置 SPI 为模式 0,也就是 CPOL=0, CPHA=0。*/
59 spi_setup(spi);/*设置好 spi_device 以后需要使用 spi_setup 配置一下。*/
60 icm20608dev.private_data = spi; /* 设置私有数据 *//*设置 icm20608dev 的 private_data 成员变量为 spi_device。*/
61
62 /* 初始化 ICM20608 内部寄存器 */
63 icm20608_reginit();/*调用 icm20608_reginit 函数初始化 ICM20608,主要是初始化 ICM20608 指定寄
存器。*/
64 return 0;
65 }
66
67 /*
68 * @description : spi 驱动的 remove 函数,移除 spi 驱动的时候此函数会执行
69 * @param – client : spi 设备
70 * @return : 0,成功;其他负值,失败
71 *//*icm20608_remove 函数,注销驱动的时候此函数就会执行。*/
72 static int icm20608_remove(struct spi_device *spi)
73 {
74 /* 删除设备 */
75 cdev_del(&icm20608dev.cdev);
76 unregister_chrdev_region(icm20608dev.devid, ICM20608_CNT);
77
78 /* 注销掉类和设备 */
79 device_destroy(icm20608dev.class, icm20608dev.devid);
80 class_destroy(icm20608dev.class);
81 return 0;
82 }4)、icm20608 寄存器读写与初始化
1 /*
2 * @description : 从 icm20608 读取多个寄存器数据
3 * @param – dev : icm20608 设备
4 * @param – reg : 要读取的寄存器首地址
5 * @param – val : 读取到的数据
6 * @param – len : 要读取的数据长度
7 * @return : 操作结果
8 */
9 static int icm20608_read_regs(struct icm20608_dev *dev, u8 reg,
void *buf, int len)
10 {
11 int ret;
12 unsigned char txdata[len];
13 struct spi_message m;
14 struct spi_transfer *t;
15 struct spi_device *spi = (struct spi_device *)dev->private_data;
16
17 gpio_set_value(dev->cs_gpio, 0); /* 片选拉低,选中 ICM20608 */
18 t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
19
20 /* 第 1 次,发送要读取的寄存地址 */
21 txdata[0] = reg | 0x80; /* 写数据的时候寄存器地址 bit7 要置 1 */
22 t->tx_buf = txdata; /* 要发送的数据 */
23 t->len = 1; /* 1 个字节 */
24 spi_message_init(&m); /* 初始化 spi_message */
25 spi_message_add_tail(t, &m);/* 将 spi_transfer 添加到 spi_message */
26 ret = spi_sync(spi, &m); /* 同步发送 */
27
28 /* 第 2 次,读取数据 */
29 txdata[0] = 0xff; /* 随便一个值,此处无意义 */
30 t->rx_buf = buf; /* 读取到的数据 */
31 t->len = len; /* 要读取的数据长度 */
原子哥在线教学:www.yuanzige.com 论坛:www.openedv.com
1467
I.MX6U 嵌入式 Linux 驱动开发指南
32 spi_message_init(&m); /* 初始化 spi_message */
33 spi_message_add_tail(t, &m);/* 将 spi_transfer 添加到 spi_message*/
34 ret = spi_sync(spi, &m); /* 同步发送 */
35
36 kfree(t); /* 释放内存 */
37 gpio_set_value(dev->cs_gpio, 1); /* 片选拉高,释放 ICM20608 */
38
39 return ret;
40 }
41
42 /*
43 * @description : 向 icm20608 多个寄存器写入数据
44 * @param – dev : icm20608 设备
45 * @param – reg : 要写入的寄存器首地址
46 * @param – val : 要写入的数据缓冲区
47 * @param – len : 要写入的数据长度
48 * @return : 操作结果
49 */
50 static s32 icm20608_write_regs(struct icm20608_dev *dev, u8 reg,
u8 *buf, u8 len)
51 {
52 int ret;
53
54 unsigned char txdata[len];
55 struct spi_message m;
56 struct spi_transfer *t;
57 struct spi_device *spi = (struct spi_device *)dev->private_data;
58
59 t = kzalloc(sizeof(struct spi_transfer), GFP_KERNEL);
60 gpio_set_value(dev->cs_gpio, 0); /* 片选拉低 */
61
62 /* 第 1 次,发送要读取的寄存地址 */
63 txdata[0] = reg & ~0x80; /* 写数据的时候寄存器地址 bit8 要清零 */
64 t->tx_buf = txdata; /* 要发送的数据 */
65 t->len = 1; /* 1 个字节 */
66 spi_message_init(&m); /* 初始化 spi_message */
67 spi_message_add_tail(t, &m);/* 将 spi_transfer 添加到 spi_message */
68 ret = spi_sync(spi, &m); /* 同步发送 */
69
70 /* 第 2 次,发送要写入的数据 */
71 t->tx_buf = buf; /* 要写入的数据 */
72 t->len = len; /* 写入的字节数 */
73 spi_message_init(&m); /* 初始化 spi_message */
74 spi_message_add_tail(t, &m);/* 将 spi_transfer 添加到 spi_message*/
75 ret = spi_sync(spi, &m); /* 同步发送 */
76
77 kfree(t); /* 释放内存 */
78 gpio_set_value(dev->cs_gpio, 1);/* 片选拉高,释放 ICM20608 */
79 return ret;
80 }
81
82 /*
83 * @description : 读取 icm20608 指定寄存器值,读取一个寄存器
84 * @param – dev : icm20608 设备
85 * @param – reg : 要读取的寄存器
86 * @return : 读取到的寄存器值
87 */
88 static unsigned char icm20608_read_onereg(struct icm20608_dev *dev,
u8 reg)
89 {
90 u8 data = 0;
91 icm20608_read_regs(dev, reg, &data, 1);
92 return data;
93 }
94
95 /*
96 * @description : 向 icm20608 指定寄存器写入指定的值,写一个寄存器
97 * @param – dev : icm20608 设备
98 * @param – reg : 要写的寄存器
99 * @param – data : 要写入的值
100 * @return : 无
101 */
102
103 static void icm20608_write_onereg(struct icm20608_dev *dev, u8 reg,
u8 value)
104 {
105 u8 buf = value;
106 icm20608_write_regs(dev, reg, &buf, 1);
107 }
108
109 /*
110 * @description : 读取 ICM20608 的数据,读取原始数据,包括三轴陀螺仪、
111 * : 三轴加速度计和内部温度。
112 * @param - dev : ICM20608 设备
113 * @return : 无。
114 */
115 void icm20608_readdata(struct icm20608_dev *dev)
116 {
117 unsigned char data[14];
118 icm20608_read_regs(dev, ICM20_ACCEL_XOUT_H, data, 14);
119
120 dev->accel_x_adc = (signed short)((data[0] << 8) | data[1]);
121 dev->accel_y_adc = (signed short)((data[2] << 8) | data[3]);
122 dev->accel_z_adc = (signed short)((data[4] << 8) | data[5]);
123 dev->temp_adc = (signed short)((data[6] << 8) | data[7]);
124 dev->gyro_x_adc = (signed short)((data[8] << 8) | data[9]);
125 dev->gyro_y_adc = (signed short)((data[10] << 8) | data[11]);
126 dev->gyro_z_adc = (signed short)((data[12] << 8) | data[13]);
127 }
128 /*
129 * ICM20608 内部寄存器初始化函数
130 * @param : 无
131 * @return : 无
132 */
133 void icm20608_reginit(void)
134 {
135 u8 value = 0;
136
137 icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_1, 0x80);
138 mdelay(50);
139 icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_1, 0x01);
140 mdelay(50);
141
142 value = icm20608_read_onereg(&icm20608dev, ICM20_WHO_AM_I);
143 printk("ICM20608 ID = %#X\r\n", value);
144
145 icm20608_write_onereg(&icm20608dev, ICM20_SMPLRT_DIV, 0x00);
146 icm20608_write_onereg(&icm20608dev, ICM20_GYRO_CONFIG, 0x18);
147 icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG, 0x18);
148 icm20608_write_onereg(&icm20608dev, ICM20_CONFIG, 0x04);
149 icm20608_write_onereg(&icm20608dev, ICM20_ACCEL_CONFIG2, 0x04);
150 icm20608_write_onereg(&icm20608dev, ICM20_PWR_MGMT_2, 0x00);
151 icm20608_write_onereg(&icm20608dev, ICM20_LP_MODE_CFG, 0x00);
152 icm20608_write_onereg(&icm20608dev, ICM20_FIFO_EN, 0x00);
153 }5)、字符设备驱动框架
重点是第 22~38 行的 icm20608_read 函数,当应用程序调用 read 函数读取 icm20608 设备文件的时候此函数就会执行。此函数调用上面编写好的icm20608_readdata 函数读取 icm20608 的原始数据并将其上报给应用程序。
3、编写测试APP
32 int main(int argc, char *argv[])
33 {
34 int fd;
35 char *filename;
36 signed int databuf[7];
37 unsigned char data[14];
38 signed int gyro_x_adc, gyro_y_adc, gyro_z_adc;
39 signed int accel_x_adc, accel_y_adc, accel_z_adc;
40 signed int temp_adc;
41
42 float gyro_x_act, gyro_y_act, gyro_z_act;
43 float accel_x_act, accel_y_act, accel_z_act;
44 float temp_act;
45
46 int ret = 0;
47
48 if (argc != 2) {
49 printf("Error Usage!\r\n");
50 return -1;
51 }
52
53 filename = argv[1];
54 fd = open(filename, O_RDWR);
55 if(fd < 0) {
原子哥在线教学:www.yuanzige.com 论坛:www.openedv.com
1473
I.MX6U 嵌入式 Linux 驱动开发指南
56 printf("can't open file %s\r\n", filename);
57 return -1;
58 }
59
60 while (1) {
61 ret = read(fd, databuf, sizeof(databuf));
62 if(ret == 0) { /* 数据读取成功 */
63 gyro_x_adc = databuf[0];
64 gyro_y_adc = databuf[1];
65 gyro_z_adc = databuf[2];
66 accel_x_adc = databuf[3];
67 accel_y_adc = databuf[4];
68 accel_z_adc = databuf[5];
69 temp_adc = databuf[6];
70
71 /* 计算实际值 */
72 gyro_x_act = (float)(gyro_x_adc) / 16.4;
73 gyro_y_act = (float)(gyro_y_adc) / 16.4;
74 gyro_z_act = (float)(gyro_z_adc) / 16.4;
75 accel_x_act = (float)(accel_x_adc) / 2048;
76 accel_y_act = (float)(accel_y_adc) / 2048;
77 accel_z_act = (float)(accel_z_adc) / 2048;
78 temp_act = ((float)(temp_adc) - 25 ) / 326.8 + 25;
79
80 printf("\r\n 原始值:\r\n");
81 printf("gx = %d, gy = %d, gz = %d\r\n", gyro_x_adc,
gyro_y_adc, gyro_z_adc);
82 printf("ax = %d, ay = %d, az = %d\r\n", accel_x_adc,
accel_y_adc, accel_z_adc);
83 printf("temp = %d\r\n", temp_adc);
84 printf("实际值:");
85 printf("act gx = %.2f°/S, act gy = %.2f°/S,
act gz = %.2f°/S\r\n", gyro_x_act, gyro_y_act,
gyro_z_act);
86 printf("act ax = %.2fg, act ay = %.2fg,
act az = %.2fg\r\n", accel_x_act, accel_y_act,
accel_z_act);
87 printf("act temp = %.2f°C\r\n", temp_act);
88 }
89 usleep(100000); /*100ms */
90 }
91 close(fd); /* 关闭文件 */
92 return 0;
93 }六、运行测试
1、编译驱动程序和测试APP
1)、编译驱动程序
1 KERNELDIR := /home/zuozhongkai/linux/IMX6ULL/linux/temp/linux-imxrel_imx_4.1.15_2.1.0_ga_alientek
......
4 obj-m := icm20608.o
......
11 clean:
12 $(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean第 4 行,设置 obj-m 变量的值为“ icm20608.o”。
输入如下命令编译出驱动模块文件:
make -j32
编译成功以后就会生成一个名为“ icm20608.ko”的驱动模块文件。
2)、编译测试APP
在编译的时候加入如下参数即可:
-march-armv7-a -mfpu-neon -mfloat=hard
输入如下命令使能硬件浮点编译 icm20608App.c 这个测试程序:
arm-linux-gnueabihf-gcc -march=armv7-a -mfpu=neon -mfloat-abi=hard icm20608App.c -o
icm20608App
2、运行测试
输入如下命令加载 icm20608.ko 这个驱动模块。
depmod //第一次加载驱动的时候需要运行此命令
modprobe icm20608.ko //加载驱动模块
当驱动模块加载成功以后使用 icm20608App 来测试,输入如下命令:
./icm20608App /dev/icm20608
测试 APP 会不断的从 ICM20608 中读取数据,然后输出到终端上
七、总结
本节的内容较多,可以分成两天进行学习。主要学习了SPI驱动开发及运行测试的相关内容。
本文为参考正点原子开发板配套教程整理而得,仅用于学习交流使用,不得用于商业用途。