引言
一文入门BMS(电池管理系统)_bms电池管理-CSDN博客
BMS进阶(Type-C、PD快充、充电IC、SOC算法、电池管理IC)_充电ic asi aso功能-CSDN博客
本文是上面两篇博客的续篇,之前都是讲解一些BMS基本原理,接下来将会更加深入地去了解BMS的行业应用及职位的要求。
写着写着感觉又不小心给自己挖坑了
有纰漏请指出,转载请说明。
学习交流请发邮件 1280253714@qq.com
BMS在哪些行业应用广泛?
新能源汽车行业:
电动汽车:BMS在电动汽车中起到关键作用,负责监测电池的状态,如电压、电流、温度、荷电状态(SOC)等,以确保电池安全、有效地为车辆提供动力。BMS还进行电池均衡控制,防止单体电池过充或过放,从而延长电池组的整体寿命。
混合动力汽车与插电式混合动力汽车:这些车辆也配备有BMS,用于管理电池组在混合动力系统中的工作,包括电池充放电控制、能量回收管理以及故障检测与处理。
储能系统:
可再生能源储能:在太阳能和风能等可再生能源系统中,BMS监控储能电池的状态,确保电池在充放电过程中的安全和效率,从而支持可再生能源的稳定供电。
电网储能:BMS用于大型储能系统,如电网级储能电站,以平衡电网负荷,提高电网稳定性。
无人机:
飞行电池管理:无人机电池需要高能量密度和快速充电能力,BMS负责监控电池状态,确保无人机在飞行中的电源供应稳定,同时优化电池使用效率。
安全保护:BMS通过监控电池温度、电压等参数,防止电池过热或损坏,从而确保无人机的飞行安全。
电动工具:
电池充放电控制:电动工具电池需要频繁充放电,BMS通过智能控制算法,确保电池在充放电过程中的效率和安全性。
电池状态监测:BMS持续监测电池状态,向用户提供电池剩余电量、健康状态等信息,帮助用户更好地管理电池。
我认为,新能源汽车相较于其他行业,其BMS更为复杂,也更值得去学。电动工具和无人机的BMS,由于电芯数量较少,通常低于十个,其电压平台也低于36V,因此在复杂度和危险系数上相对较低。这使得它们的控制策略相对简单,不需要过于复杂的算法和管理机制。然而,电动汽车的BMS则截然不同。它不仅涉及到电池组的管理,还需要与整车的控制系统进行深度整合。电动汽车的BMS需要精确控制每一个电芯的状态,确保电池组的安全、高效运行,同时还要满足整车对能量的需求。这使得电动汽车的BMS在技术和策略上都要复杂得多。随着电动汽车技术的不断发展,BMS的功能和性能将直接影响到整车的性能、安全和可靠性。
为什么新能源汽车BMS更难更值得去学?
技术复杂性:新能源汽车BMS涉及的技术更为复杂。它不仅要管理电池的基本参数,如电压、电流、温度、SOC(荷电状态)等,还要进行电池均衡控制、热管理、故障诊断等多项功能。此外,新能源汽车BMS还需要与车辆其他系统进行集成和通信,如车辆控制系统、充电系统等。
安全要求:新能源汽车BMS的安全要求更高。电池是新能源汽车的核心部件,其安全性和可靠性直接关系到车辆的运行安全和乘客的生命安全。因此,新能源汽车BMS需要具备更高的故障检测和处理能力,以确保电池在各种极端条件下的安全运行。
系统集成性:新能源汽车BMS需要与车辆其他系统进行紧密的集成和协同工作。这要求BMS工程师不仅要具备电池管理系统的知识,还需要对车辆整体架构、控制系统、通信网络等有深入的了解。系统集成性的要求使得新能源汽车BMS的学习难度增加。
标准与法规:新能源汽车行业涉及的标准和法规较多,如电池安全标准、电磁兼容性标准、环保法规等。这些标准和法规对BMS的设计和开发提出了严格的要求,需要BMS工程师具备相关的法律意识和合规意识。
新能源汽车电池管理系统
新能源汽车的电池管理系统是BMS(电池管理系统)的一个重要且广泛的应用领域。深入理解BMS(电池管理系统)确实需要对汽车相关知识有一定的掌握。通过结合汽车工程、电子技术和能源管理等多方面的知识,能精准地评估BMS的性能,优化其设计,并推动新能源汽车行业的持续进步(工资进步)。
以下来源于某招聘网站的BMS工程师职位介绍
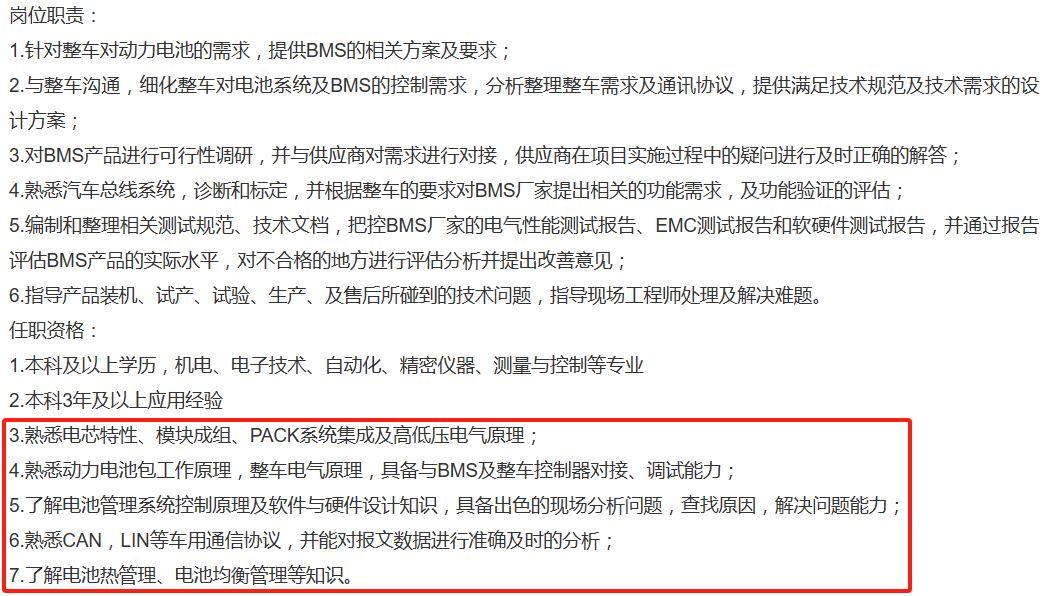


总结以上
电芯级
电芯材料、电芯特性、电路模型、电芯参数、电芯制造工艺、快充不析锂、电芯充放电曲线
PACK级
动力电池电池包工作原理、模块成组、PACK系统集成
算法
SOC、SOH、SOP、SOE、SOF
异常诊断
UDS诊断、热失控诊断、内短路诊断、自放电异常诊断
管理
热管理、均衡管理、异常管理(过充、过放、过温、低温、短路)
MBD(基于模型的设计)
MATLAB/simulink模型搭建、仿真、代码生成
软硬件
ARM、CAN/串口总线(用于充电桩、整车ECU、VCU、调试测试等)、RTOS(FreeRTOS、AUTOSAR)、工具链快充
动态充电规划、智能充电算法、充电安全防护、充电接口技术、电池均衡、热管理
安全规范
各种安规标准
动力电池基本特性
以下内容部分参考自 电动汽车动力电池建模与SOC估计研究_李畅
开路电压特性
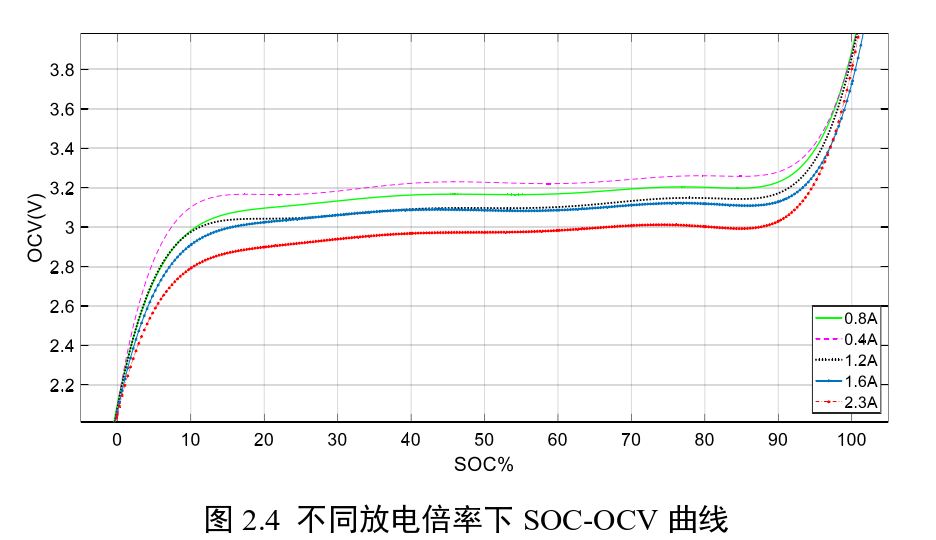
实验发现,磷酸铁锂电池开路电压曲线有着中间部分平缓、两端快速变换的特点。即 当SOC处于20%以下以及80%以上时,OCV迅速变化,而在20%至80%时,不同SOC 值对应的OCV近乎相同。同时,动力电池放电倍率越大,电池在相同SOC时的OCV越 低;反之放电倍率越小,电池在相同SOC时的开路电压就越大。

由图可以看出,静置时间越长,相同SOC点所对应的开路电压就越大。
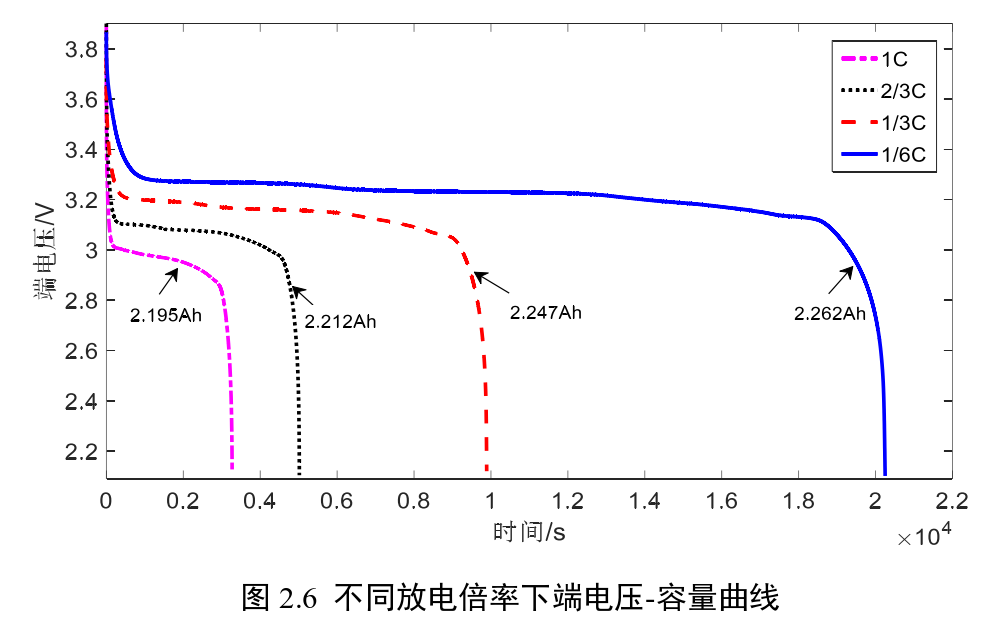
容量特性
电池的容量是指在特定环境条件下,按特定的放电倍率进行充分放电时所能放出的 电量值。额定容量是在出厂之前由厂家校准的,而实际容量则是日常实际使用过程中, 计算电流在时间上的积分得到的。因温度,老化,放电倍率等因素的作用,使其实际容量大小要比额定容量值要低。实验过程中,把电池分别采用不同的放电倍率对其进行放电试验, 记录每次情况下的电池所能放电的容量的变化规律。结果表明在电池进行大倍率放电时 实际所能放电量比较小,原因是在大电流状态下放电会令电解槽中的电子快速移动,从而降低了化学反应的程度。
内阻特性
欧姆内阻指的是组成电池材料的电阻。
极化电阻是指。。。
温度特性
伴随着温度的升高,电池容量略微增加
循环特性
电池循环一次指电池经过一次完整充电和放电过程。在长时间的充放电过程中,电池材料会发生反应,同时随着循环次数的增加,会导致电池容量和寿命的衰退。
电池等效电路模型
Rin等效模型
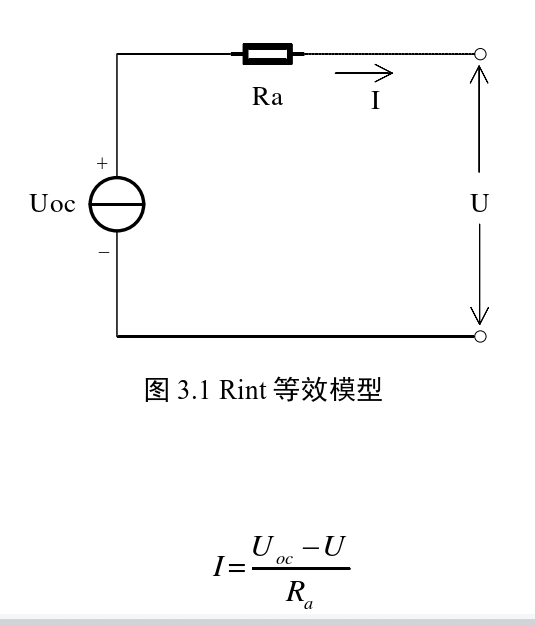
Rint模型结构简单,参数容易识别,但该模型过于理想化,没有考虑到锂离子电 池的内部特性,所以与实际工作的电池不兼容,仅能在对精确度要求较低的条件下应用。
Thevenin等效电路模型

Thevenin模型是一种不计电流积聚、过充电、过放等因素 影响的动态数学模型。
二阶RC电路等效模型
 二阶RC模型的准确性较高,可较准确地反映出电池中各参 数的变化情况。采用两条RC支路,分别对电化学极化和浓度极化两种效应进行了模拟仿 真,模型精度有所提高,受到广泛应用。
二阶RC模型的准确性较高,可较准确地反映出电池中各参 数的变化情况。采用两条RC支路,分别对电化学极化和浓度极化两种效应进行了模拟仿 真,模型精度有所提高,受到广泛应用。
BMS(电池管理系统)的工具链
BMS(电池管理系统)之所以需要用到很多工具链,是因为BMS是一个复杂的系统,涉及硬件、软件、通信、测试等多个方面。每个方面都需要专业的工具来支持开发、调试、测试和维护等工作。以下是几个常见的BMS工具链及其作用:
硬件设计工具链:包括电路设计工具、PCB设计软件、嵌入式系统开发环境等。这些工具用于设计、开发和测试BMS的硬件部分,确保硬件能够满足系统的要求。
软件开发工具链:包括集成开发环境(IDE)、编译器、调试器、代码管理工具等。这些工具用于编写、编译、调试和维护BMS的软件代码,确保软件能够正确运行并与硬件协同工作。
通信协议工具链:BMS需要与车辆的其他系统进行通信,因此需要使用相应的通信协议工具链。这些工具用于开发、测试和调试BMS的通信功能,确保BMS能够与其他系统正确地进行数据交换和控制。
测试与验证工具链:包括仿真工具、测试台架、测试软件等。这些工具用于对BMS进行各种测试和验证,以确保其功能和性能符合要求。
过多工具链的弊端
然而,使用过多的工具链也会带来一些弊端:
复杂性增加:多个工具链之间需要相互协作,可能会导致开发、调试和测试的过程变得复杂和繁琐。
学习成本高:每个工具链都有其独特的使用方法和要求,开发人员需要花费大量时间来学习和掌握这些工具。
集成挑战:将多个工具链集成到一个统一的系统中可能面临技术挑战,需要投入大量的人力和物力资源。
成本和资源限制:使用多个工具链可能会增加开发成本和周期,对于小型和中型企业来说可能是一个负担。
因此,在选择BMS工具链时,需要权衡其带来的好处和弊端,并根据实际情况做出合理的选择。同时,随着技术的发展和标准化程度的提高,未来可能会有更加集成化和标准化的BMS工具链出现,以解决现有工具链过多的问题。
从BMS众多的工具链到MBD
如何使用MBD开发Autosar架构的电池管理控制器BMS模型(1)_哔哩哔哩_bilibili
以下内容部分参考自 基于模型设计的纯电动汽车电池管理系统开发_周琴
使用模型基础的开发(Model-Based Development, MBD)在电池管理系统(BMS)开发中的原因主要是因为BMS涉及的工具链复杂多样,而且系统的复杂性和对可靠性的要求非常高。
BMS开发的复杂性和对可靠性的高要求,采用MBD方法可以大大提高开发效率、减少错误、加强团队合作,并最终提高产品的质量和性能。
传统汽车电子软件和硬件研发是紧密相连、高度集成的,这体现了嵌入式系统开发中的“物尽其用”原则。然而,这也带来了一些显著的挑战。例如,由于存在多种多样的MCU处理器,它们在不同的应用环境下被使用,导致相应的开发工具也各不相同。传统汽车电子控制单元的开发流程存在以下问题:
(1)硬件平台:在进行电子控制单元研发时,由于硬件种类繁多(如NXP、STL32、英飞凌等),使得编译器的数量也达到了数百种。这导致电子控制单元的开发受到硬件配置的严重制约。一旦有相关的约束条件发生更改,程序就需要重新编写。
(2)手写代码:随着汽车电子控制单元的功能日益复杂,代码行数也在不断增加,从而引发了日益严重的代码质量问题。由于不同工程师的经验存在差异,他们编写的代码也存在较大的差异,这增加了代码测试和验证的难度,提高了维护成本。使用手写代码进行汽车电子开发时,效率较低,延长了开发周期,同时复杂的算法也难以实现。
(3)生命周期:当前汽车行业面临的最大问题是汽车电子控制单元的生命周期远远小于车型的生命周期。通常,在车型的生命周期中,需要面临电子控制单元的更新换代,这意味着电子控制单元中的代码需要重新开发或修改。
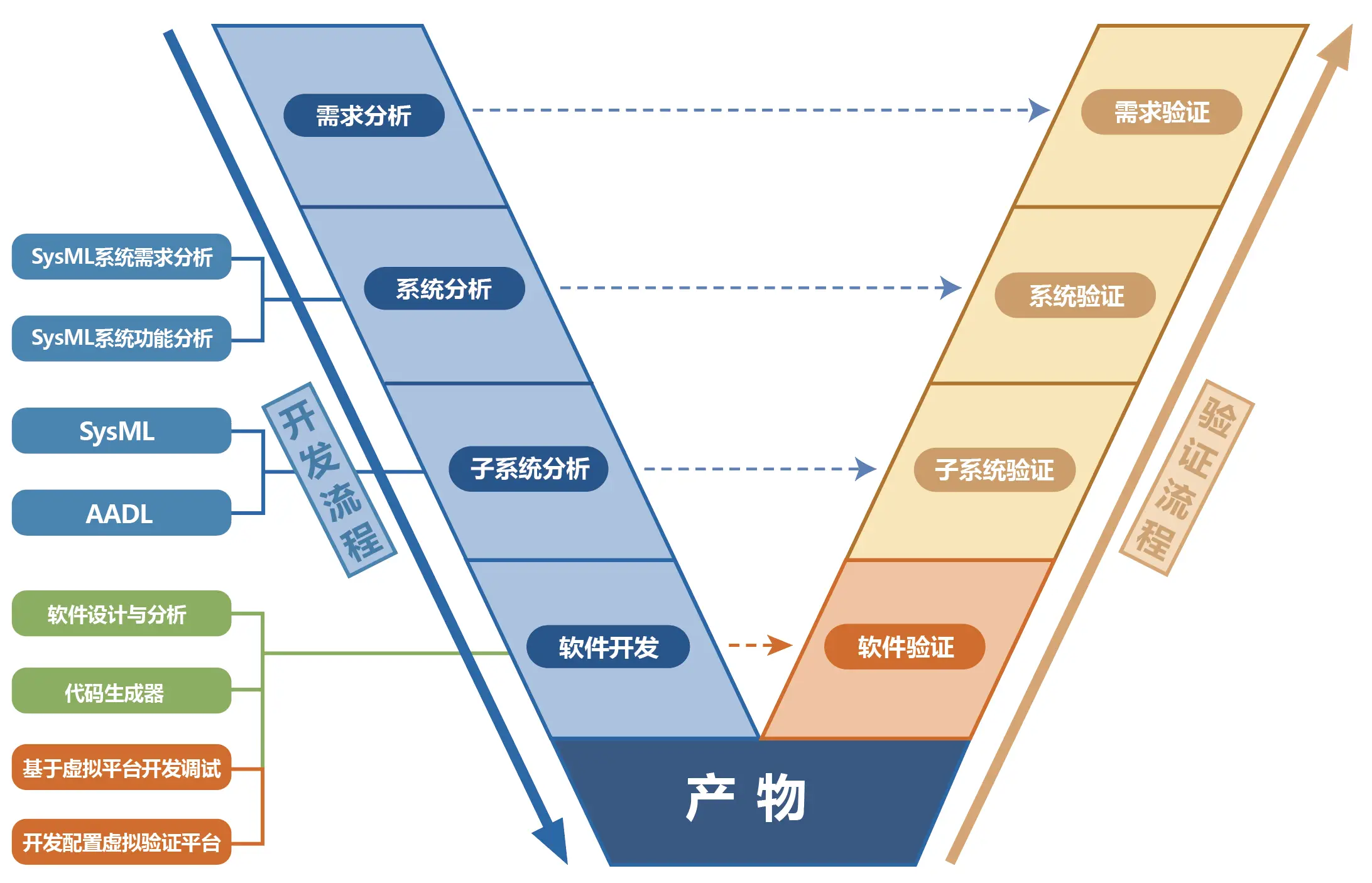
为了解决传统汽车电子开发行业中存在的共性问题,提升系统的可复用性和开发效率,越来越多的研究人员开始采用一种名为“V”模型的开发流程来开发汽车控制器软件。这种开发流程不仅适用于BMS,还适用于整车控制器、电机控制器等汽车控制器的开发。具体的电池管理系统“V”模型软件开发流程如图1-9所示。在“V”模型的左侧,是研发过程,主要进行BMS需求分析、系统架构设计和程序设计。将BMS控制器模型生成的代码与手写代码集成是开发过程中最重要的环节。而在右侧,是测试过程,主要是对左侧的开发过程进行各种相关测试,以确保研发的BMS能够达到预期的功能目标。