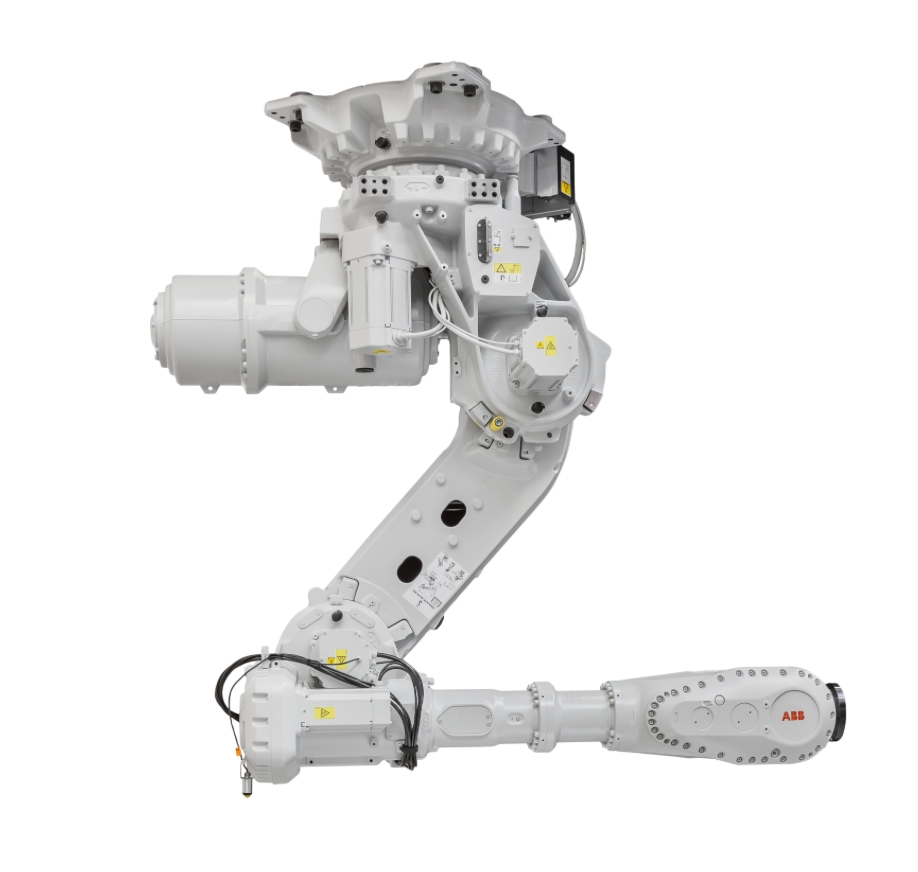
当ABB IRB6700机器人减速机出现抖动问题时,就需要及时进行维修,这涉及到专业的ABB机器人维修、工业机器人维修以及机器人减速机维修知识。
减速机抖动会导致ABB IRB6700机器人在执行任务时的定位精度下降。在工业生产中,对于诸如汽车零部件组装、电子产品制造等对精度要求极高的工序,这可能会导致产品次品率上升。
1. 准备工作
在进行机器人减速机维修前,需要先将ABB IRB6700机器人停止运行,并切断电源。确保工作区域安全,防止意外发生。准备好所需的工具,如专用的拆卸工具、扭矩扳手等,这些都是工业机器人维修必备的工具。同时,要准备好新的减速机,确保其型号与原减速机一致,这是保证维修成功的关键因素之一。
2. 拆卸旧减速机
首先,要拆除与减速机相连的外部部件,如电机、联轴器等。这需要按照ABB机器人的结构设计,小心地进行拆卸操作,避免对其他部件造成损坏。在工业机器人维修中,这一步骤需要非常谨慎,因为任何不当的拆卸都可能导致后续的装配问题。然后,松开固定减速机的螺栓,使用合适的工具将旧减速机从机器人的关节部位取出。
3. 安装新减速机
在将新减速机安装到ABB IRB6700机器人之前,要对新减速机的安装面进行清洁,确保没有杂质。然后,将新减速机小心地安装到原来的位置,并用螺栓按照规定的扭矩进行紧固。在安装过程中,要确保减速机与其他部件的连接准确无误,这对于保证机器人的正常运行至关重要。这一步在整个ABB机器人维修流程中是非常关键的部分。
4. 调试与测试
新减速机安装完成后,需要对ABB IRB6700机器人进行调试。在工业机器人维修后,调试是确保机器人能够恢复正常工作的重要环节。首先,重新连接电机、联轴器等外部部件。然后,给机器人通电,进入机器人的编程界面,对机器人的关节运动进行测试。检查机器人在各个方向的运动是否平稳,是否还存在抖动现象。
在工业机器人的使用过程中,针对ABB IRB6700机器人减速机抖动的维修,无论是从确定维修原因、进行减速机更换的具体操作,还是维修后的维护措施,都离不开专业的ABB机器人维修、工业机器人维修以及机器人减速机维修知识和技术。只有这样,才能确保机器人的稳定运行,提高工业生产的效率和质量。







![[AI/前沿展望/综述] AI大模型的技术生态链全景图](https://blog-static.cnblogs.com/files/johnnyzen/cnblogs-qq-group-qrcode.gif?t=1679679148)