本篇为3b1b系列【微积分的本质】笔记
原视频:02-导数的悖论 | 03-用几何来求导 | 04-直观理解链式法则和乘积法则
定义导数
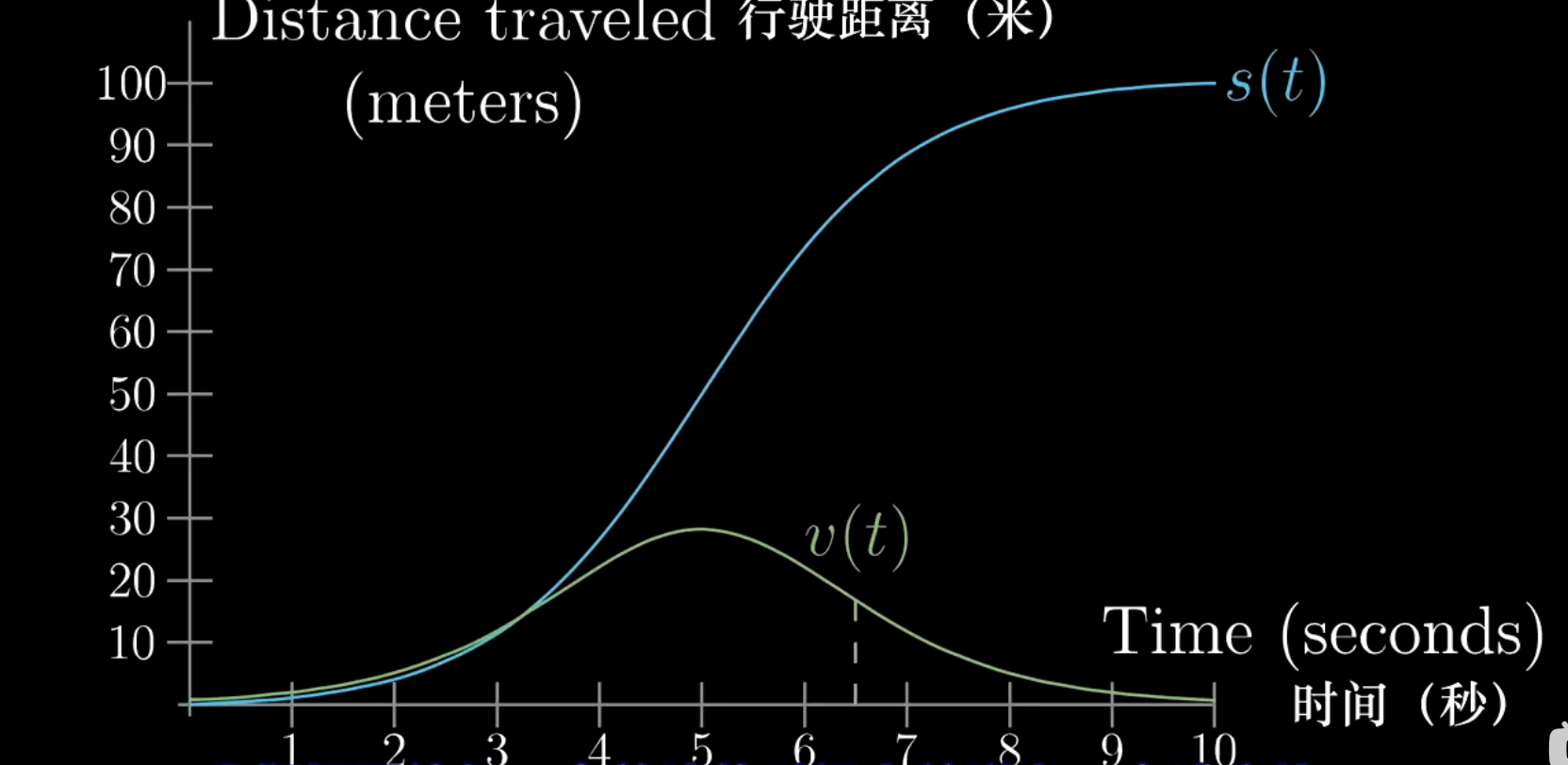
这是一个随着时间变化,车辆行驶距离的坐标图
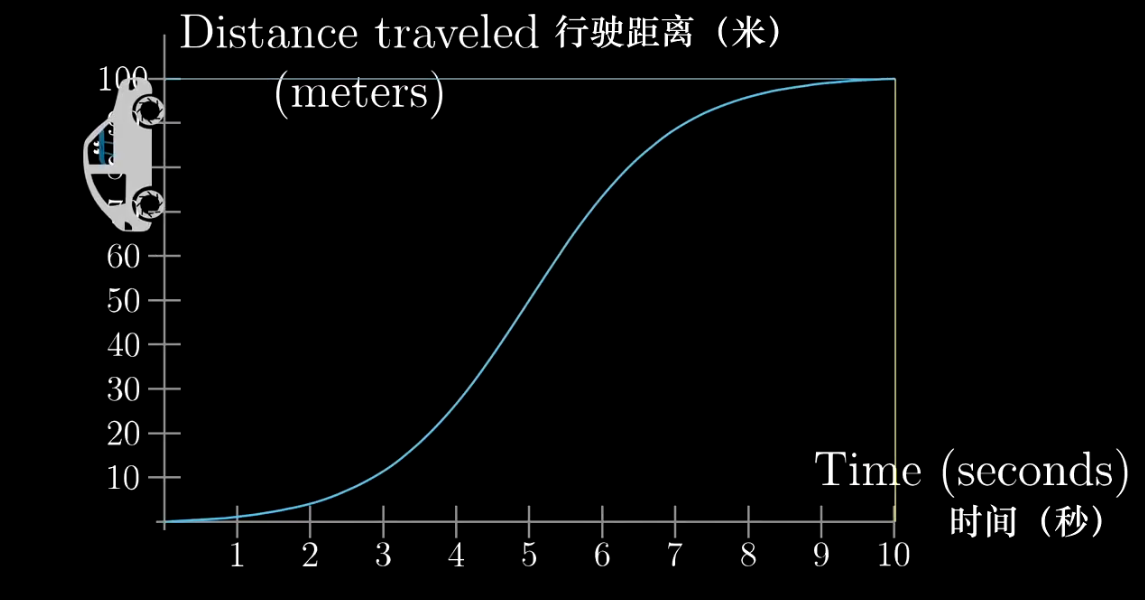
在横轴的任何一个点\(t\)上,如果你去查看车的车速表,上面都有一个数字表示当前的车速,但这是如何计算的?因为要知道,若\(t\)被固定在一个瞬间,车速必然是0,因为此时车是静止的。
所以,瞬时的车速是不存在的。
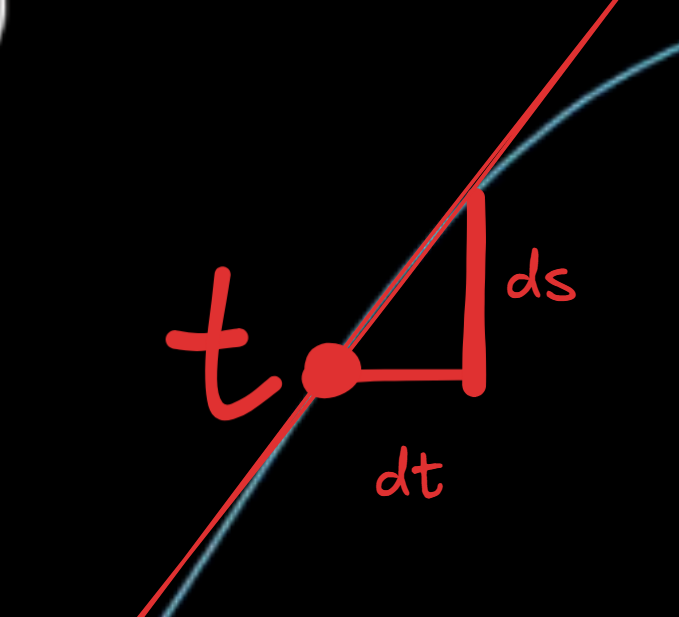
一旦要谈论速度,必然不能让\(t\)固定。现实中车速表的做法是,让\(t\)有一个极短时间的变化\(dt\)(假如0.0001秒),再采集\(t\)到\(dt\)时间段内行驶的距离(假设是\(ds\)),用\(\frac{ds}{dt}\)即可得到一个短时间内的速度。如果不考虑物理限制,\(dt\)越趋近于\(0\),我们得到的车速越精确。同时,\(\frac{ds}{dt}\)也是过速度曲线上时间变化前后两点的切线斜率。
设上图中车随时间行驶的距离的函数为\(s(t)\)
在实践中我们可以给出一个关于\(t\)的函数来计算车速:\(\frac{ds}{dt}(t)=\frac{s(dt+t) - s(dt)}{dt}\),对于算法来说,下一步就是选定一个合理的\(dt\)。
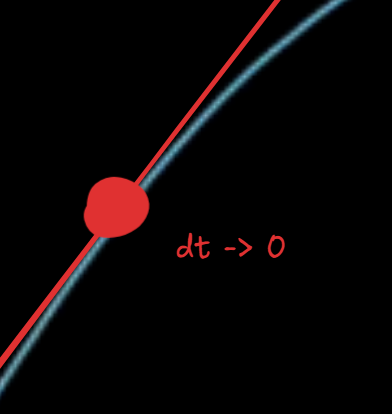
对于数学来说,研究特定的\(dt\)没有意义,如果带入极限思想,让\(dt\)无限趋近于0,我们可以得出一个计算瞬时车速最好的函数,对于给定\(t\),该函数的结果无限趋近于\(t\)点在函数\(s(t)\)上切线的斜率,这就是导数。
或者可以说:对于函数\(f\)以及给定点\(x\),导数是\(f\)上\(x\)附近变化率的最佳近似,等于在\(f\)上\(x\)点切线的斜率。
在下图的现实意义上,它反映了车速的变化率:
刚刚我们用了符号\(dt\)表示了自变量车速\(t\)的微小变化,\(ds\)表示了因变量或函数结果\(s(t)\)因为车速微小变化\(dt\)产生的变化,最后,使用\(\frac{ds}{dt}(t)\)来表示计算车速的实际函数。而在数学中,这就是导数的一种书写形式,我们把\(f(x)\)的导数写作\(\frac{df(x)}{dx}\)、\(\frac{dy}{dx}\)或直接写作\(f'(x)\)、\(y'\)。
用几何看待导数
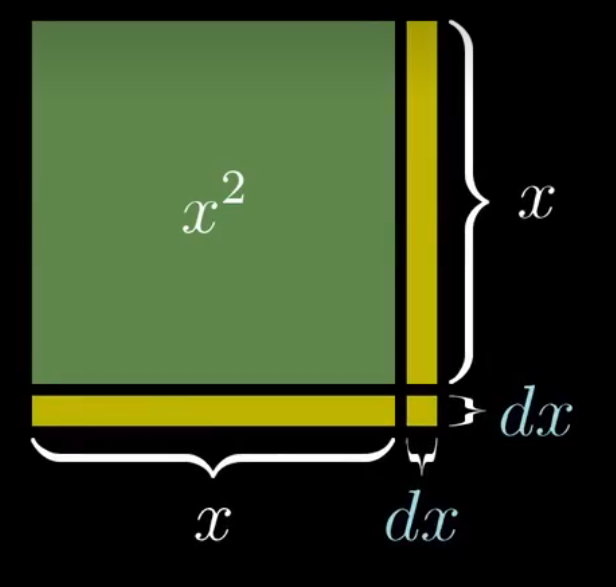
\(f(x)=x^2\)
如下图,当\(x\)产生微小变化\(dx\)时,图中正方形的面积的微小变化\(df\)多了\(2xdx+dx^2\),当\(dx\)无限趋近于零,后面的\(dx^2\)可以省略,则\(df=2xdx, \frac{df}{dx}=2x\)。
注意,\(df\)是随着\(x\)产生微小变化后,函数值(面积)的变化,而\(\frac{df}{dx}\)则是一个关于\(x\)的函数,产生\(f(x)=x^2\)这个函数上任意点\(x_i\)的导数(面积的变化率)。后面我们不会再重复。
\(f(x)=x^n, f'(x)=nx^{n-1}\)
加法法则:\(f(x) + g(x)\)
下图展示了一个两个函数相加的例子,我们假设两函数相加产生的新函数是\(h(x)\),当\(x\)产生微小变化,\(dh(x)=df(x)+dg(x)=cos(x)dx + 2xdx, \frac{dh}{dx}=cos(x) + 2x\)
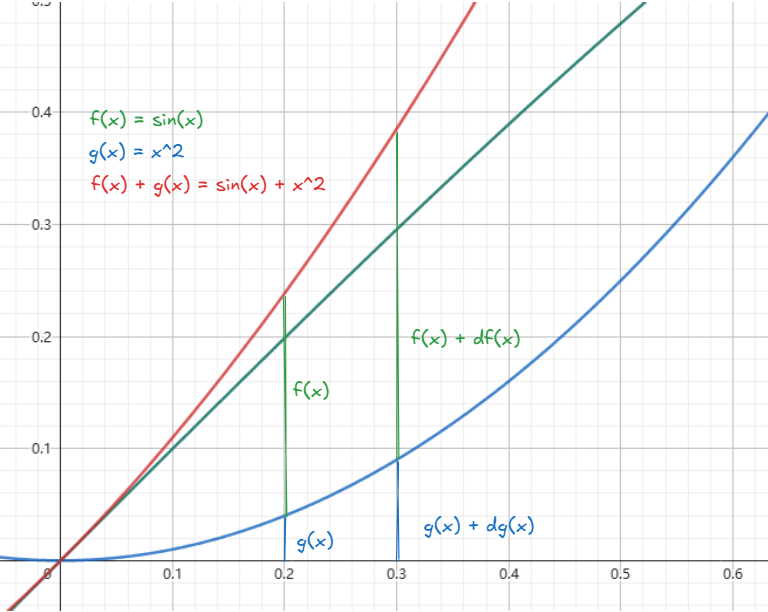
\(h(x)=f(x)+g(x), h'(x)= f'(x) + g'(x)\)
乘法法则:\(f(x)\times g(x)\)
对于乘积,以面积来可视化最好。
如下图,四边形的横边是\(f(x)=sin(x)\),纵边是\(g(x)=x^2\),面积是复合函数\(h(x)=f(x)g(x)\)。
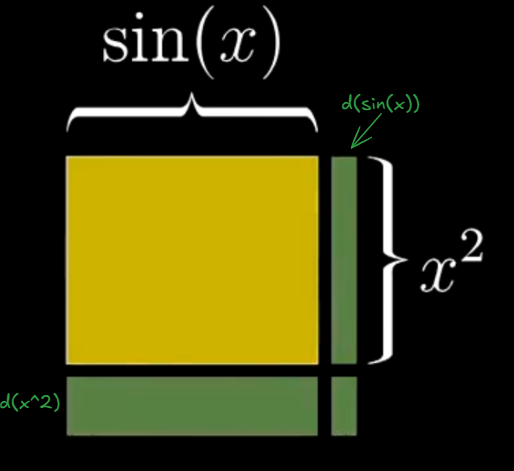
当\(x\)发生微小变化,\(dh=sin(x)d(x^2)+x^2d(sin(x))+d(x^2)d(sin(x))=sin(x)2xdx+x^2cos(x)dx, \frac{dh}{dx}=sin(x)2x+x^2cos(x)\)
\(h(x)=f(x)g(x), h'(x)= f'(x)g(x) + f(x)g'(x)\)
链式法则:\(f(g(x))\)
几何展示略
\(h(x)=f(g(x)), h'(x)=f'(g(x))g'(x)\)

![折腾笔记[17]-使用rust创建linux系统服务](https://img2024.cnblogs.com/blog/1048201/202503/1048201-20250325030034182-706998303.png)
![[PNPM] 其他包管理器](https://xiejie-typora.oss-cn-chengdu.aliyuncs.com/2024-08-21-021003.png)